
DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
54TH ANNUAL CONFERENCE, Sofia, Bulgaria, 20-24 April 2015WP No. 89Blended AirspacePresented by TOC |
Summary
The remote tower concept is gaining considerable attention around the world, primarily for financial reasons but for others as well. Such systems are generally designed to perform all current functions of the control tower and more, but the US FAA initiative called “Blended Airspace” is smaller in scope and seeks to provide only limited aerodrome control services. Blended Airspace is not the remote tower concept as generally understood because it lacks the clear safeguards that remote towers provide and does not provide all services.
Introduction
1.1 A significant number of non-towered airports in the US experience seasonal traffic fluctuations associated with special events or peak travel seasons. The US state of Colorado has a number of small airports, where winter skiing tourism is vital to the economy. Non-radar arrival and departure procedures tend to limit the efficiency of these airports. But the short duration of seasonal traffic does not support installation of a standard control tower.
1.2 Service at these airports has improved in recent years by the installation of Wide Area Multilateration (WAM) antennas. WAM is a surveillance technique that exploits the 1090 MHz transmissions broadcast from aircraft. The Denver area facility began using WAM data operationally to serve four airports in September 2009.

1.3 Using WAM data, the controllers noticed they could observe aircraft at low altitudes and even moving on the airport surface. This led to the question of whether aerodrome control services could be provided to the ground using surveillance only. The Colorado government took an interest in this and asked the FAA to investigate the possibility of providing tower services at certain airports from a facility outside of those airports. The state provided funding.
1.4 The concept, known as Blended Airspace, intends to provide some, but not all, aerodrome control services.
1.5 As shown in the graphic, from a presentation by the Fort Collins – Loveland Airport in February 2013, the Blended Airspace concept is being advertised to enhance safety, attract air carriers, and save tens of millions of dollars in future airport expenses.
Discussion
2.1 The Problem
2.1.1 At US airports with dense, complex and sustained traffic, the FAA will provide aerodrome control services either by building, supporting and staffing a control tower or by engaging a contractor to staff the tower. The FAA currently staffs or contracts for ATC services at 700 towers.
2.1.2 In the US, a Non-Towered Airport (NTA) or uncontrolled field is an aerodrome with no control tower. A US NTA functions by decentralized coordination. The pilots manage their own use of the runways and airspace near the airport. Most pilots will communicate their intentions to others using the Common Traffic Advisory Frequency (CTAF). This NTA concept has been in service for decades, but is best suited at airports with low traffic density and the where pilots are familiar with the local area.
2.1.3 IFR traffic arriving at these airports receive ATC services from overlying facilities, including separation from other IFR traffic under either radar or non-radar procedures. As the aircraft approach the Class D airspace, ATC advises them to switch to the CTAF for advisories. ATC cannot clear other aircraft in or out of the airport until the pilot reports landing or cancels the IFR clearance. (See Appendix 1 for US Class D airspace.)
2.1.4 These procedural limitations of the overlying sector controller restrict traffic flow. IFR operations at NTAs are characterized by extensive coordination and inefficient “one-in, one-out” operations. General aviation is often not subject to traffic management, and when these IFR aircraft arrive within five to ten minutes of each other airborne holding is often required. When all traffic is flow-managed, ground delay programs often result.
2.1.5 As traffic increases and more jet aircraft arrive along with non-local pilots, the decentralized control environment becomes less effective. Pilots are not required to use the CTAF and this can cause confusion. Where the traffic is diverse in performance, including single-engine propeller aircraft and jets, it can be difficult for pilots to provide their own merging and spacing. Local airport procedures vary, including departure restrictions and traffic pattern height and direction, and this can challenge inexperienced pilots based elsewhere.
2.1.6 Seasonally busy NTA airports in Colorado experience these problems during winter ski season. In certain instances where small airports have short term traffic peaks, as is common during major sporting events or disaster response, the FAA deploys temporary towers and executes agreements with adjacent and overlying facilities to safely manage event traffic. These towers are portable and are relocated as necessary. They could offer relief to ski destination airports. But ski season can last 3-6 months and the logistics of keeping several temporary towers in a single state for that long are not practical. It may also be challenging to recruit and maintain staff in rural areas.
2.1.7 The decision to install an Air Traffic Control Tower (ATCT) is made by the FAA and the process can be explained as follows:
The criteria and computation methods used in determining the eligibility of terminal locations for VFR tower establishment and discontinuance is based on economic analysis of the costs and benefits of a control tower. The criterion compares the present value of VFR tower benefits (BPV) at a site with the present value of VFR tower costs (CPV) over a 15-year time frame. A location is eligible for a control tower when the benefits derived from operating the tower exceed the installation and operation costs.
2.1.8 In the US, new Federal contract towers (staffed by non-FAA controllers) cost approximately 2-3 million USD. Annual operating costs are in the range of 750,000 USD. Similar towers, designed, funded, and staffed by the FAA itself, can cost three to five times that. Budgets for smaller towers tend to be very tight due to high fixed costs for safety, security and facility maintenance.
2.1.9 The problem is defined by the FAA in the below terms, which apply to a number of aerodromes in Colorado:
While many of the non-towered airports have significant seasonal demand they do not qualify for the Federal Contract Tower Program and cannot support a business case to design and construct an Air Traffic Control Tower (ATCT).
2.1.10 Surveillance data at potential Blended Airspace airports in Colorado is already available and some of those airports are highlighted in Figure 1 below:
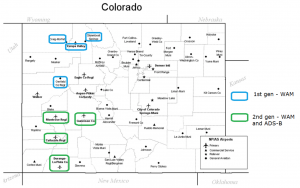
Figure 1: Colorado Airports with WAM or ADS-B
2.1.11 In the Blended Airspace concept, an existing facility and existing surveillance data are used to provide some tower services.
The FAA advertises these benefits:
- Increased throughput and efficiency at NTAs.
- Reduce delays during periods of peak air traffic demand.
- An alternative to a traditional control tower at medium- and low-activity airports.
- More efficient use of the local airspace.
- Optimized airport operations by closer balancing of capacity with peak demand.
- Increase support for pilots during emergency situations.
2.2 Concept of Operations (ConOps)
2.2.1 A recent version of the FAA concept document describes the aim of the program:
(Note: ATCT: Air Traffic Control Tower, ARTCC: En Route or Area Facility, TRACON: Approach Control Facility, NTA: Non-Towered Airport, “Local Control” refers to Aerodrome Control Service)
The aim of the Blended Airspace concept is to expand the ATC services provided to aircraft arriving at, departing from, and operating at selected NTAs. This concept employs an alternative method to deliver these services compared to a traditional physical ATCT at the airport. The concept envisions approach and departure services provided by a controller in an overlying air traffic facility as is done today. However, a subset of the air traffic services provided by today’s tower controller will be provided by a Blended Airspace controller (BAC) located in a remote facility, rather than from a classic air traffic control tower at the airport. The concept requires seamless and integrated surveillance between an airborne surveillance system and a surface surveillance system at the NTA in order to provide these services.
In addition, radio communications coverage must be sufficient to allow two-way communication between controllers and pilots operating to, from, and at the NTA. Additionally, aircraft and vehicles must be equipped with cooperative surveillance technologies. Controllers will use information obtained from the surveillance systems and from pilot reports to obtain sufficient situational awareness to maintain a safe and orderly air traffic operation in the airspace immediately surrounding the airport and on selected portions of the airport surface.
2.2.2 The ConOps then gives a general description of the concept as follows:
The Blended Airspace concept provides a subset of ATC services (i.e., local control and clearance delivery) to non-towered airports delivered by an air traffic controller who is not physically present in an ATCT at the non-towered airport.
The BAC works in conjunction with the overlying IFR jurisdictional facility controller to provide aircraft with uninterrupted ATC service as aircraft transition from arrival to landing and/or to departure phases of flight and takeoff. Since there is no tower with an out-the-window view at these airports, the concept requires blending existing, emerging and potentially new technologies to enable its implementation. The solution reduces spacing between IFR arrivals and departures through the application of terminal radar separation standards as a replacement for current five (5) NM standards or non-radar procedures.
On the ground, Blended Airspace will introduce new procedures applying tower separation standards through the use of ground surveillance to determine distances between successive arrivals, successive departures, and to declare arrivals and departures “clear of the runway.”
Figure 2 shows an operational view of the concept.
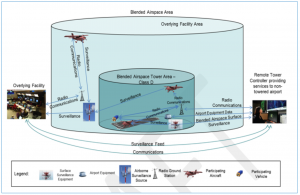
Figure 2: Operational View of the Blended Airspace Concept
2.2.4 The role of the Blended Airspace Controller is to provide aerodrome control service, clearance delivery and some other services in the Class D airspace above remotely, using an airborne and a ground display of surveillance data, as well as some other yet- to-be-determined means of observation. The latter could possibly include cameras and “surface sensors”, according to the ConOps. (See Appendix 1 for US Class D.)
2.2.5 Although the term “Blended” is referred to in the context of blending of technologies and procedures, the project uses the term to mean the goal of seamless integration of tower, approach and area air traffic control services. The technology seeks to blur the line between ATC functions.
2.3 How it would work and how the concept has changed
2.3.1 The Blended Airspace Controller (BAC) is radar-certified and:
- Manages arrival traffic. Sequences VFR aircraft into the IFR stream and issues landing clearances.
- Manages surface traffic and separates runway traffic.
- Provides pilots with IFR and VFR departure clearances and updates ATIS.
- Establishes departure sequence and issues takeoff clearances.
- Manages traffic pattern using surveillance display and pilot reports.
- Issues safety alerts and traffic advisories.
- Determines and tracks location of aircraft requesting services.
- Provides weather information to pilots.
- Supports to aircraft emergencies and coordinates with local personnel.
- Selects active runway, coordinates opening and closing and sets lighting.
- Provides administrative functions.
- Could apply Same Runway and Anticipated Separation procedures. (See Appendix 2 for current Same Runway Separation procedures.)
2.3.2 The Blended Airspace Controller issues clearances to VFR traffic. This includes departure, takeoff, and landing as well as clearances to aircraft in the pattern and inbound aircraft to establish the sequence. The BAC does not use radar vectors, but instead uses clearances such as the following:
- “Turn left and follow the Jetsream at your 10’o’clock.”
- “Turn base now”
- “Extend upwind.”
2.3.3 The overlying sector controller responsibilities remain unchanged, providing for all IFR separation (arrivals/arrivals, arrivals/departures, departures/departures) and establishing the landing sequence for IFR arrivals. The overlying controller also coordinates arrival sequence and approves IFR departure releases with BAC.
2.3.4 The original Concept of Operations, published in May 2014, did not include cameras or primary radar. The only means the controller had of determining aircraft position was to be the display of ADS-B or WAM surveillance data and pilot reports.
2.3.5 Human-in-the-loop studies conducted in July 2014 determined that this concept not only did not provide a benefit but was in many ways counterproductive. The BAC could not apply virtually any reduced separation methods because those methods required the determination of key flight events that surveillance could not provide (see Appendix 2). These included the moment the aircraft takeoff roll begins and liftoff. The BAC also was not radar certified and could not use surveillance for separation, only pilot reports.
2.3.6 The Concept of Operations as of December 2014 mentions the use of cameras but provides virtually no details as to their configuration and use, nor of the video display. It also includes numerous references to a surface surveillance system, including:
“Blended Airspace surface surveillance equipment will detect and display cooperative and non- cooperative targets in the Runway Safety Area (RSA), ILS critical areas/Precision Obstacle Free Zone (POFZ) during all weather conditions.”
2.3.7 These references seem to suggest there is an emerging technology which will bring improvements to today’s surface surveillance technologies. The least expensive FAA ground radar is Airport Surface Surveillance Capability, at $4 million, but an expense such as this would seem to negate all cost savings of the Blended Airspace concept. There are other commercially available options, but none are approved for use in the US nor are in the testing phase for approval. The rulemaking required to enable the use of such systems means it will be many years before they could possibly see action.
2.4 Requirements as of December 2014:
According to the ConOps, implementation of the Blended Airspace concept requires a large number of changes to equipment, procedures, infrastructure, equipage and airspace as detailed below:
2.4.1 Displays, systems and interfaces:
- Surface surveillance system and display certified for separation
- Airborne surveillance coverage to the runway integrated with surface surveillance
- Airborne surveillance display such as Certified Tower Radar Display (CTRD) integrated with overlying facility automation
- Systems and displays able to manage airfield lighting, frequencies, ground communications, weather, automated broadcasts, equipment status, etc.
2.4.2 Procedures:
- For applying runway separation using surface surveillance
- For applying terminal separation standards using the airborne surveillance
2.4.3 Aircraft and vehicle equipage:
- As required for surface surveillance (currently Mode A/C or S transponders).
- As required for airborne surveillance (currently Mode A/C or S transponders).
- Two-way radio.
2.4.4 Airspace:
- Blended Airspace would become Class D, but would require additional equipage such as ADS-B or transponder if multilateration is available.
2.4.5 Figure 3 shows how the surface of the airport is classified. Note that the US uses a slightly modified version of the ICAO class C and D airspace as it does not require an ATC clearance for VFR operations, only radio contact with ATC.
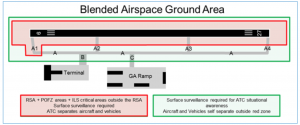
Figure 3: Blended Airspace Ground Area
(Note: POFZ: Precision Obstacle Free Zone, RSA: Runway Safety Area)
2.4.6 The idea of creating a modified Class D, to include a transponder requirement. However, neither ICAO nor the US Class D requires a transponder. This would essentially be a new airspace classification.(See Appendix 1 for US Class D.)
2.4.7 Non-participating aircraft include those without an extended squitter or Mode C transponder and those without communications capability. Blended Airspace only allows for the presence of non-participating aircraft under a letter of agreement or special arrangement with the facility. Without such, the BAC has no means to manage a non- participating aircraft and the airport would thus be effectively closed until the situation is resolved.
2.4.8 The US controller association, NATCA, has identified at least 12 sections of the FAA Air Traffic Manual (7110.65) that require visual observation and would therefore have to be modified.
These requirements include:
- Scan runways and insure they are free of vehicles, equipment and personnel.
- Inform aircraft of any observed abnormal aircraft conditions.
- Use light guns as needed.
- Receive aircraft acknowledgment by visual means.
- Apply anticipated and Same Runway Separation (see App. 1) by visual means.
- Visual observation for landing clearance.
- Visual observation of aircraft “rolling”.
2.5 Blended Airspace “Actors”
2.5.1 Figure 4 shows various actors involved with Blended Airspace.
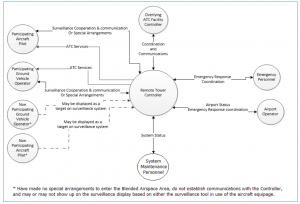
Figure 4: Actors in the Blended Airspace Area
2.5.2 Non-participating aircraft and vehicles without transponders are not known to the controller unless one of the other participants physically present makes visual contact and reports this on the radio. Non-participants with transponders would include those who have not or cannot establish radio communications. In either case, these would cause airport operations to cease.
2.6 Use of Surveillance in Place of Visual Observation
2.6.1 Tower controllers in the USA use visual runway separation methods such as Same Runway Separation (See Appendix 2) and the Blended Airspace concept calls for the use of surveillance data and displays to employ visual runway separation methods.
2.6.2 These separation methods rely on the ability of the controller to identify key phases of flight including the moment the aircraft begins the takeoff roll and the moment the aircraft lifts off the runway. Surface surveillance methods are not generally precise enough to identify the “rolling” event. Mode C is only accurate to within ±200 feet, and this makes it undesirable as a means of identifying aircraft liftoff.
2.6.3 Without visual runway separation methods, the Blended Airspace concept offers little benefit. In addition, the controller is deprived of the ability to detect anything without a transponder.
2.6.4 Both of these factors have led the project to move away from the minimalist approach and consider the investment in additional equipment including cameras and primary radar.
2.7 Use of Cameras
2.7.1 The ConOps uses the term “camera” four times, and refers to cameras in the context of system components which “may evolve as the concept matures.”
2.7.2 A 2012 US work group found that there are no national orders, guidelines, procedures, or standards that define camera installation, siting, performance and usage. A Safety Risk Management Panel (SRMP) from stakeholder organizations was assembled and met in Washington, DC on October 23-24, 2012 to identify and analyze hazards associated with implementing video cameras into Terminal facilities in the NAS for enhanced airport surface situational awareness.
2.7.3 The Panel reviewed the proposed change and identified five hazards, which may have led to some reluctance on the use of them in Blended Airspace:
1. Increased complexity and workload of ATC position,
2. Over-reliance on the camera system,
3. Obstruction of the camera lens,
4. Misinterpretation of displayed information or misleading information, and
5. Approval of a construction project that blocks ATC clear line of sight to a movement area.
2.7.4 The Blended Airspace concept has not even begun to address these concerns. It also has not begun to identify any of the operational details of camera use within the proposed system, such as pan-tilt-zoom, multi-camera views, composite views, location of cameras, video enhancement, etc. In the near future, the program does intend to consider commercial camera systems for inclusion in the BA design concept.
2.7.5 It is worth emphasizing that Blended Airspace is not the commonly understood remote tower concept. Blended Airspace an attempt to take a small slice of tower services and provide them remotely.
2.8 Alternatives to Blended Airspace and Costs
2.8.1 One alternative to Blended Airspace is the status quo. As described previously, the US handles uncontrolled airports through the use of coordination by pilots. In some cases, they negotiate arrivals and departures between themselves in more efficient ways than Blended Airspace could provide. In addition, many Colorado NTAs have already realized significant gains in efficiency and capacity by the use of advanced surveillance including ADS-B and multilateration by the overlying facility.
2.8.2 Since late 2014, air traffic controllers at Sundsvall Remote Tower Center have been remotely controlling take-offs and landings from Örnsköldsvik Airport, 100 km away, using the SAAB remote tower suite of high-tech video and sensor equipment. Preliminary reviews indicate start-up costs for the SAAB system in the same range as the Federal contract tower. However, the services provided are far more than those provided by Blended Airspace.
The SAAB system is much more developed, as it seeks to provide all of the services of a traditional tower, not just a few.
The SAAB system includes the following on-field components:
- Pan-tilt, high resolution, digital cameras with zoom and 360 degree coverage
- High definition panoramic displays
- Signal light guns
- Microphones providing sounds to the controller
- Meteorological sensors
- Integrated tower systems (navigational aids, distress systems, etc.)
- Object tracking and alerting
- Night vision
While Blended Airspace aims to provide separation services both on the runway and in the air, most remote tower systems are advisory only. The SAAB system does provide for separation services but it is currently limited to four airborne aircraft and one on approach.
2.8.3 According to the European Cockpit Association:
Modern RTS [Remote Tower Service] concepts include a number of tracking features. Aircraft position can be followed easily with a label attached next to the tracked target on the controller’s out-the-window screen, giving information on the call sign, altitude, and distance among others. Ground staff and vehicles can be tracked, as well as birds and other animals or human intruders. Runway incursions can be automatically detected….The increased possibilities of presenting multiple data inputs are likely to lead to enhanced visual reproduction, especially during twilight and night, as well as bad weather. The use of infrared cameras allows for weather assessment and target detection even during complete darkness.
Blended Airspace offers none of these benefits.
2.8.4 On November 3, 2014, LFV, the Swedish ANSP, received an operating license for remote tower services from the Swedish Transport Agency. Örnsköldsvik Airport became first airport in the world to have remote air traffic control services, with controllers handling traffic from the Sundsvall control center.
2.8.5 No definitive cost estimates have been documented for Blended Airspace.
It will depend on the following:
- Ground stations needed (MLAT or ADS-B)
- Ground infrastructure at the airport (radar, radios, controls, etc)
- Distance between RTC and airport
- Data costs
- Facility costs for the BA facility
- Controller training and compensation
- Charting
- Pilot training
- Airport signage
- Other
2.9 Issues in a No Camera Environment
2.9.1 The original Blended Airspace concept did not include cameras. The presence of non- participating aircraft or vehicles without primary radar or cameras is detectable only by pilot reports, and ACAS might not detect aircraft on the ground.
2.9.2 In the event that a non-participating aircraft or vehicle is present – one which is not detectable and not communicating – the aerodrome must be closed. There is no way for the controller to know the location of the intruder and provide a safe operation. In addition, how does the controller then make a judgment as to when to resume operations? The controller could face significant pressure to do so, especially at an airport serving celebrities and the super-elite. Employing users in this case to serve as surrogate eyes is problematic at best and perilous at worst.
2.9.3 Detection of equipment errors and other problems is critical to safe operation. Without visual reference, the controller is entirely dependent on the surveillance displays and feedback from pilots for decision-making. Any failure of the electronic displays, data sources or data transmission mechanisms must be identified promptly.
2.9.4 Multi-runway operations are not authorized in Blended Airspace because there is no observation of the field and no safety case has been completed. The decentralized methods of separation used at non-towered fields cannot be applied in Blended Airspace since the aircraft are on the BAC frequency, not the conventional CTAF, and cannot coordinate among themselves. As currently configured, implementation of Blended Airspace services at a multi-runway field would require designation of a primary runway and closure of all others.
2.9.5 At aerodromes with tower control services, pilots expect controllers to monitor the runway for foreign objects, animals and other hazards. Pilots might not be aware that these advisories would not be provided and that the controller could legally clear the aircraft directly into a hazardous situation.
2.9.6 Unexpected events at towered fields can include a vehicle turning the wrong way, an aircraft go-round, a transponder malfunction, an emergency, etc. Certain unexpected events – including non-participating aircraft or vehicles – can shut down a Blended Airspace airport as mentioned earlier. The same event in an uncontrolled airport or a towered field would not necessarily disrupt the flow of traffic. Blended Airspace will frequently restrict operations rather than improve them.
2.9.7 One event to consider in Blended Airspace is the crash of an aircraft. Without any transmission by the pilot, only a stationary target, the controller would likely be at a loss to know what had happened. While the controller of a traditional tower or contemporary remote tower system would immediately observe the signs of a calamity, the Blended Airspace controller would have to rely on local reports, which may not exist. Loss of radio could cause the controller to think a crash had happened when it hadn’t.
2.9.8 Some runway separation methods depend on visual observation that one aircraft is clear of the runway. Use of secondary radar to determine this introduces potential discrepancies associated with the accuracy of the radar (± 21 feet) and the location of the transponder on the aircraft. In addition, a very slow climb could be indistinguishable from the takeoff roll.
2.9.9 Wake turbulence and other runway separation methods depend on the initiation of a takeoff roll. The use of surveillance to detect the takeoff roll could lead to errors due to target jump, the unexpected decision of the pilot to taxi off the runway, or under other scenarios. There appears to be no research on the use of surface surveillance to establish runway separation.
2.9.10 Control of traffic in the pattern depends on visual cues such as seeing the aircraft bank as the turn begins for the base leg. The same turn will not apparent using surveillance for perhaps many seconds when there is a significant change to the trajectory. Go-arounds would be affected similarly. Whether initiated by the controller or the pilot, the trajectory of a go-around could vary and it’s crucial for the controller to observe the change in attitude to nose-up in order to coordinate the control of other aircraft.
2.10 General Issues
2.10.1 Two independent channels of telecommunications infrastructure are required to support the transmission of surveillance data and communications between the controller and the airport. The maintenance costs of this infrastructure are dependent on the distance of the run, and analysis of these costs for proposed implementations are incomplete.
2.10.2 The Blended Airspace concept is entirely dependent on the safe and accurate transmission of data between the tower and the remote facility. Should this data flow fail or become compromised in any way – whether by equipment failure, software failure, intentional interference or any other means – the airport would have to fall back to standard NTA operations or close. The process for identifying a failure and notifying all of the participants is not established.
2.10.3 No investigation has taken place as to the legality of a takeoff clearance from a remotely located controller in the US. Similarly, there has been no evaluation of the concept of a limited subset of aerodrome control services from an insurance standpoint. The project has been expending resources for several years devising an operational concept, yet has done nothing to establish the legality of the concept nor the insurance implications. This scenario is highly problematic because were an issue to develop in either of these areas, the stage would be set for a political struggle that would undermine objectivity.
2.10.4 One possible result of an evaluation of takeoff clearances given remotely is the creation of a new clearance such as “N123 cleared for remote takeoff.” Hearing this, pilots would have a better situational awareness. Depending on the final BA configuration, the controller will have various limitations the pilots would need to understand.
2.10.5 The ConOps includes a list of stakeholders. While this list does include controllers, it does not include any other system users. Airlines have not been involved with the project, nor have representatives of general aviation or pilot representatives. The lack of coordination sets up additional potential for political struggles.
2.10.6 For the concept to work, 100% pilot participation would be required. Achieving this could be quite a challenge. It seems like there will be notices sent out to pilots and signs on the surface of the aerodrome. But ultimately how would the FAA enforce participation? There is little documentation to address this aspect currently.
2.10.7 To date, testing has consisted of a failed human-in-the-loop simulation. Many situations have not even been simulated, including non-VFR conditions and Special VFR.
2.10.8 The Blended Airspace project does not provide cost comparisons with alternatives such as temporary towers, part-time towers and aerodrome flight information service (AFIS). Although BA may be financially justified, no such justification has been documented to make the business case for this method.
2.11 Existing IFATCA Policy
2.11.1 Gran Canaria, 2014:
| ATCOs shall not be required to provide a Remote and Virtual tower service for more than one aerodrome simultaneously.Separation standards and procedures for Remote and Virtual Towers shall be developed or adapted and implemented based on a robust safety case and the demonstrated capabilities of the system.
Standards, procedures and guidance for Remote and Virtual Tower systems are required. |
2.11.2 Kathmandu 2012:
|
Visual observation in ATM is defined as: Observation through direct eyesight of objects situated within the line of sight of the observer possibly enhanced by binoculars. In Aerodrome Control Towers, the use of CCTV is not accepted to replace Visual Observation. The use of CCTV is only accepted to supplement Visual Observation where:
[…] Surface Movement Surveillance Systems should be installed at all airfields where low visibility operations take place and its operation should be mandatory while these operations are in progress. Safeguards should be imposed to prohibit the development of any structure that would impede the direct visual observation from the tower. |
2.11.3 Istanbul 2007:
An Aerodrome Control Tower is a unit established to provide air traffic control service to aerodrome traffic. The tower cab shall be constructed as to provide aerodrome controllers the capability to maintain a continuous watch on all flight operations on and in the vicinity of the aerodrome as well as vehicles and personnel on the maneuvering area. Watch shall be maintained by visual observation, augmented by radar or other approved surveillance systems when available.Before any Aerodrome Control Service Concept can be endorsed by IFATCA, the following requirements shall be met:
|
2.11.4 The Gran Canaria policies are quite relevant. Blended Airspace will require new procedures and possibly new separation standards. Only through a robust and thorough safety case can problems be identified and potentially mitigated.
Blended Airspace certainly qualifies as an Aerodrome Control Service Concept, but the Istanbul policy seems oriented towards visual observation and does not seem intended for something like Blended Airspace.
2.12 ICAO Activities on the Remote Tower Concept
2.12.1 ICAO is working on the remote tower concept to determine the need to update ICAO regulations and it is included in ASBU module B1-81.
Conclusions
3.1 The Blended Airspace concept is an undertaking of the US state of Colorado and the FAA to provide some aerodrome control services at airports that currently have no control tower. These services include radar departure and arrival procedures, VFR and IFR sequencing and advisories, runway separation, clearance delivery, weather distribution, runway selection and emergency response. Ground control is not included.
3.2 The Blended Airspace concept is made possible because of surveillance methods such as ADS-B and wide area multilateration.
3.3 Blended airspace is a significantly different concept than remote tower and carries unique barriers to implementation that would have to be overcome to ensure safety.
These issues include:
- New situational awareness for pilots, unique to a Blended Airspace airport.
- The creation of a new airspace class.
- The likely creation of a new takeoff clearance, recognizing that the controller cannot observe the runway.
- The identification of runway separation to be applied. Blended airspace is neither procedural nor visual, procedures and standards need to be clearly identified and trained.
- The creation of new contingency procedures for non-participating aircraft as well as failures and errors of new and unproven infrastructure systems.
- Development of new ways for the controller to identify the takeoff roll and runway liftoff.
- Handling of unclear legal issues regarding responsibility for detection and hazard avoidance.
With so many variables and with the knowledge that the implementation of even simple new procedures into the aviation systems carry significant challenges, a considerable amount of research and validation would be needed to create a viable safety case. The core concept of creating a new level of service somewhere in between the traditional tower and the non-towered field represents a great burden. Testing has demonstrated that trying to extend existing procedures and standards into the Blended Airspace environment is more complex than it seems, and this is before any legal, insurance and financial analysis has begun.
3.4 Blended Airspace is still concept. The role of cameras has not been determined nor has the role of surface surveillance. Without these, there are no means for independent identification of non-transponder intrusions. Blended Airspace calls for advancements in surface surveillance, but certification of such systems is many years away.
3.5 At present, Blended Airspace is not comparable to contemporary remote tower systems. It is an effort to provide a limited set of aerodrome control tower services from a remote location. Contemporary remote tower systems attempt to replicate all of the services of an aerodrome control tower and provide enhancements including detection of runway incursions, intruders and wildlife, enhanced vision during weather or night operations.
3.6 The value of Blended Airspace is unknown and it is unclear whether the expected benefit – an increase in efficiency – would even materialize. While it intends to use advanced runway separation methods, today’s surveillance technology does not support this. ADS-B and WAM have already provided benefits at these airports and investment in Blended Airspace may provide only marginal returns.
3.7 The costs of Blended Airspace cannot be established and documented. It is not yet possible to evaluate the endeavour and determine whether the possible benefits justify the expense because many of the system components have not been determined, including surface surveillance, cameras, data transmission, etc.
3.8 Without primary radar and high performance cameras, Blended Airspace cannot accommodate integration of non-participating aircraft. Identification of an unidentified aircraft, vehicle or other hazard can require a complete suspension of operations.
3.9 The Blended Airspace project does not consider pilots and carriers as stakeholders. It has not begun to consider legal and insurance issues related to the new procedures.
3.10 Existing IFATCA policy provides some guidance relevant to Blended Airspace.
3.11 If Blended Airspace continues to add more capabilities and becomes comparable to a modern remote tower, it would be years behind those technologies and would therefore have no commercial advantage.
Recommendations
It is recommended that:
4.1 IFATCA Policy is:
Remote and Virtual tower systems should be capable of providing the same service level as an aerodrome control tower; partial aerodrome control service configurations are undesirable.
References
“Surveillance and Broadcast Services (SBS) Program Office, Concept of Operations, Blended Airspace”, Federal Aviation Administration SBS-080 Revision 03, December 11, 2014.
Ft Collins – Loveland Airport Steering Committee Presentation, November 15, 2012.
Reason Foundation Air Traffic Control Reform News #92, April 12, 2012.
European Cockpit Association, Position Paper, Remote Tower Services, November 2014.
“SESAR: Future-Proofing European airports”, Olivier Jankovec, SESAR Magazine, Issue 11, June 2014.
“Remote towers at your service”, SESAR Magazine, Issue 11, June 2014.
“Enhanced Services at Non-Towered Airports Research Management Plan”, FAA Draft, June 2012.
“Air Traffic Services Process Brief – Criteria for Establishing Air Traffic Control Towers and the Contract Tower Program”, AOPA Magazine, December 5, 2005.
Appendix 1: Class D Airspace in the USA
From the Blended Airspace Concept of Operations:

NTAs typically are located in Class E airspace, although in some instances NTAs can be within Class B, C, D, and G airspace. FARs do not require pilots operating in Class E airspace below 10,000 feet to be equipped with a radio or transponder. Pilots operating aircraft to from, or at NTAs within other airspace classes must comply with the regulations associated with that airspace.
Table 2-1 below provides a high-level comparison of the various airspaces:
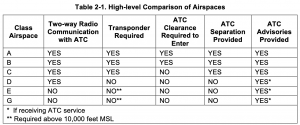
VFR Operations
VFR traffic at NTAs must follow airspace rules, but is not required to communicate with ATC, except in Class B, C, or D airspace. VFR departures take off when the pilot determines that the runway is available through visual observation and, optionally, by listening to CTAF communications. At NTAs, flight procedures rely on decentralized coordination among IFR and VFR pilots for departures, arrivals, and other flight operations that remain in the local airspace. Pilots may or may not communicate their intentions to other pilots over the radio. They are not required to actively take part in the coordination or listen to reports from other pilots, which may compromise the pilots’ situational awareness.
From FAA Order JO 7400.2K
Section 2. Class D Airspace Standards
17-2-1. CONFIGURATION
a. A Class D airspace area must be of sufficient size to:
1. Allow for safe and efficient handling of operations.
2. Contain IFR arrival operations while between the surface and 1,000 feet above the surface and IFR departure operations while between the surface and the base of adjacent controlled airspace.
b. Size and shape may vary to provide for 1 and 2 above. The emphasis is that a Class D area must be sized to contain the intended operations.
17-2-2. AIRPORT REFERENCE POINT/GEOGRAPHIC POSITION
a. The Class D airspace boundary should normally be based on the airport reference point (ARP) or the geographic position (GP) of the primary airport. The ARP/GP is the center of the airport expressed in coordinates and should be incorporated into the surface area’s legal description.
b. If a Class E surface area is established in conjunction with a part-time Class D area, the areas should normally be coincident. Explain any differences in the rulemaking documents.
NOTE-
Under certain conditions, the ARP/GP can change. If this occurs, the airspace should be reviewed to ensure the instrument procedures are still contained within existing airspace.
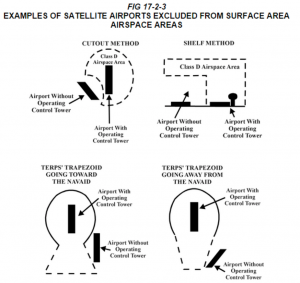
17-2-3. SATELLITE AIRPORTS
a. Using shelves and/or cutouts to the extent practicable, exclude satellite airports from the Class D airspace area (see FIG 17-2-3).
b. Satellite airports within arrival extensions may be excluded using the actual dimensions of the TERPs trapezoid.
c. Do not exclude airports inside the TERPs primary obstruction clearance area of the procedure(s) for which the surface area is being constructed or when the exclusion would adversely affect IFR operations.
17-2-4. ADJOINING CLASS D AIRSPACE AREAS
Designate separate Class D airspace area for airports in proximity to each other. A common boundary line must be used so that the airspace areas do not overlap. When operationally advantageous, the common boundary separating adjacent Class D areas may be eliminated if the areas are contained in an existing Class B or Class C airspace area controlled by the same IFR ATC facility.
17-2-5. DETERMINING CLASS D AREA SIZE
The size of a Class D area, and any necessary extensions, is determined by the use of a 200 feet per NM climb gradient and information obtained from the person responsible for developing instrument procedures (see FIG 17-2-1).
NOTE-
Normally, the person responsible for developing instrument procedures for civil and U.S. Army airports is a FAA Aviation Standards Airspace Evaluation Specialist. A military representative handles all other military procedures.
17-2-6. DEPARTURES
a. When diverse departures are authorized, design the Class D area using a radius of 3.5 NM plus the distance from the ARP/GP to the departure end of the outermost runway (see FIG 17-2-1).
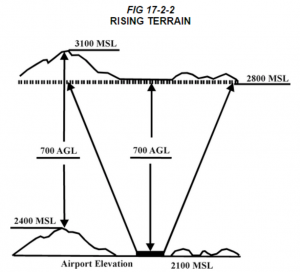
b. When specific departure routes are required, the routes will determine the shape of the Class D area. Use the 200 feet per NM climb gradient procedure in subparagraph a. above and FIG 17-2-2 plus 1.8 NM either side of the track(s) to be flown.
c. In areas with rising terrain, apply the procedures reflected in FIG 17-2-2.
17-2-7. ARRIVAL EXTENSION
a. A Class D area arrival extension must be established to the point where an IFR flight on an instrument approach can be expected to descend to less than 1,000 feet above the surface.
b. When multiple approach procedures are established using the same initial approach course, but with different 1,000-foot points, the extension length must be based on the approach requiring the greatest distance. Consistent with safety and operational feasibility, if an adjustment to the 1,000-foot point can be made to eliminate or shorten an extension, the specialist must coordinate with the person responsible for developing the instrument approach to request the adjustment.
c. The width of the extension must be equal to the width of the TERPs primary obstruction clearance area at the point where an IFR flight on an instrument approach can be expected to descend to an altitude below 1,000 feet above the surface. However, if the primary area widens between the point where the flight leaves 1,000 feet and the airport, the widened portion of the primary area located outside the basic surface area radius must be used for the extension. These extensions must, in all cases, extend to a minimum of 1 NM on each side of the centerline.
d. If all arrival extensions are 2 NM or less, they will remain part of the basic Class D area. However, if any extension is greater than 2 NM, then all extensions will be Class E airspace.
17-2-8. VERTICAL LIMITS
Class D areas should normally extend upward from the surface up to and including 2,500 feet AGL. The altitude must be converted to MSL and rounded to the nearest 100 feet. However, in a low density or non-turbo aircraft traffic environment, a vertical limit of 2,500 feet AGL may be excessive and a lower altitude should be used.
NOTE-
The nearest 100 feet means that 49 feet and below must be rounded down and 50 feet and above must be rounded up.
17-2-9. COMMUNICATIONS
Communications capability must exist with aircraft, that normally operate within the Class D Surface Area down to the runway surface of the primary airport (the airport upon which the surface area is designated). This communication may be either direct from the ATC facility having jurisdiction over the area or by rapid relay through other communications facilities which are acceptable to the ATC facility having that jurisdiction.
17-2-10. WEATHER OBSERVATIONS AND REPORTING
a. Weather observations must be taken at the primary airport during the times and dates the Class D airspace is active. A federally certified weather observer or a federally commissioned automated weather observing system (this includes all FAA and NWS approved and certified weather reporting systems) can take the weather observation. The weather observer must take routine (hourly) and special observations. An automated weather observing system can provide continuous weather observations.
b. Scheduled record and special observations from weather observers or automated weather reporting systems must be made available to the ATC facility(s) having control jurisdiction over the Class D designated surface area. This can be accomplished through Flight Service Station (FSS), Longline Dissemination, National Weather Service (NWS), or other FAA-approved sources. Facilities that require weather reports from satellite airports may enter into a letter of agreement (LOA) with the associated FSS, airline/contract observer, airport management, etc.
NOTE-
1. At ATC sites where non-Federal employees perform weather duties, the appropriate FAA office must ensure that the reporting and dissemination requirements applicable to National Weather Service and FAA publication standards are followed.
2. In facilities where direct access to automated weather observing systems is not available, controllers will apply the provisions of FAAO 7110.65, Air Traffic Control.
17-2-11. LOSS OF COMMUNICATION OR WEATHER REPORTING CAPABILITY
a. If the capabilities outlined in paragraph 17-2-9 and/or paragraph 17-2-10 are temporarily out of service for an active Class D Surface Area, a Notice to Airmen must be issued stating the temporary loss of the affected service.
b. However, if it is determined that the capabilities are consistently unavailable, a Notice to Airmen must be issued, as described above, and rulemaking action initiated to revoke the Surface Area, as appropriate.
c. The FPT needs to be kept informed of any planned action, especially when instrument approach procedures (IAP) are involved, so as to assess the impact on published approaches. The Standards Specialist may decide changes are needed in the IAP, dependent on possible new altimeter source and other considerations. These changes will have an effect on the airspace action required; e.g., minimums may be raised, or procedure may be canceled.
FIG 17-2-1
CLASS D AREA RADIUS FORMULA
Class D AREA RADIUS FORMULA
RADIUS
ARP/GP = AIRPORT REFERENCE POINT AND/OR GEOGRAPHIC POSITION
EOR = END OF OUTERMOST RUNWAY
6076 = ONE NAUTICAL MILE IN FEET
200 FEET PER NAUTICAL MILE = STANDARD CLIMB GRADIENT
D = DISTANCE IN FEET FROM ARP/GP TO EOR 3.5 MILES = DISTANCE
REQUIRED FOR DEPARTURE TO REACH 700-FOOT CLASS E AIRSPACE USING STANDARD CLIMB GRADIENT
(700/200)
2.5 MILES = DISTANCE REQUIRED FOR DEPARTURE TO REACH 1200-FOOT
CLASS E AIRSPACE USING STANDARD CLIMB GRADIENT
((1200 – 700)/200)
THE FORMULA CAN BE EXPRESSED AS: R = D/6076 + 3.5
Example:
At Airport A, the distance from the geographic position to the end of the outermost runway is 4,023 feet; therefore, assuming flat terrain, the radius is calculated as:
R = 4023/6076 + 3.5 = .662 + 3.5 = 4.162 = 4.2
The radius for the 700-foot Class E airspace becomes: 4.2 + 2.5 = 6.7
RISING TERRAIN
In the above example, an aircraft departing to the west would reach the lateral boundary of the surface area without reaching 700 feet AGL and, in effect, leave controlled airspace. To ensure that the lateral boundary of the Class D area is congruent with the beginning of the 700-foot Class E airspace, the specialist must:
a. Search the Class D area’s radius circle for the highest terrain.
b. Calculate the MSL height of the aircraft by adding 700 feet to the airport elevation.
c. Compare MSL altitudes of the aircraft versus the highest terrain to determine if the aircraft has reached the overlying or adjacent controlled airspace. If not, increase the size of the Class D area, as necessary, to contain the departure.
NOTE-
When terrain, obstacles, or procedures prohibit departures in portions of the basic surface area, a terrain search is not necessary in that area and that height is not used in the computations.
Appendix 2: Same Runway Separation (Order JO 7110.65V, Air Traffic Control)
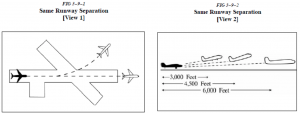
3−9−6. SAME RUNWAY SEPARATION
Separate a departing aircraft from a preceding departing or arriving aircraft using the same runway by ensuring that it does not begin takeoff roll until:
a. The other aircraft has departed and crossed the runway end or turned to avert any conflict. (See FIG 3−9−1.) If you can determine distances by reference to suitable landmarks, the other aircraft needs only be airborne if the following minimum distance exists between aircraft: (See FIG 3−9−2.)
- When only Category I aircraft are involved − 3,000 feet.
- When a Category I aircraft is preceded by a Category II aircraft− 3,000 feet.
- When either the succeeding or both are Category II aircraft− 4,500 feet.
- When either is a Category III aircraft − 6,000 feet.
- When the succeeding aircraft is a helicopter, visual separation may be applied in lieu of using distance minima.
NOTE − Aircraft same runway separation (SRS) categories are specified in Appendices A, B, and C and based upon the following definitions:
CATEGORY I− small aircraft weighing 12,500 lbs. or less, with a single propeller driven engine, and all helicopters.
CATEGORY II− small aircraft weighing 12,500 lbs. or less, with propeller driven twin−engines. CATEGORY III− all other aircraft.
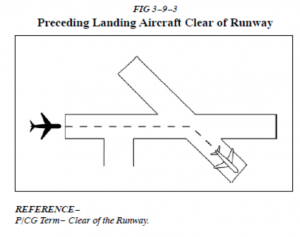
b. A preceding landing aircraft is clear of the runway. (See FIG 3−9−3.)
WAKE TURBULENCE APPLICATION
c. Do not issue clearances which imply or indicateapproval of rolling takeoffs by heavy jet aircraft except as provided in para 3−1−14, Ground Operations When Volcanic Ash is Present.
d. Do not issue clearances to a small aircraft to line up and wait on the same runway behind a departing heavy jet aircraft to apply the necessary intervals.
REFERENCE−
AC 90−23, Aircraft Wake Turbulence.
e. The minima in para 5−5−4, Minima, may be applied in lieu of the 2 minute requirement in subpara f. When para 5−5−4, Minima, are applied, ensure that the appropriate radar separation exists at or prior to the time an aircraft becomes airborne when taking off behind a heavy jet/B757.
NOTE − The pilot may request additional separation; i.e., 2 minutes vs. 4 miles, but should make this request before taxiing on the runway.
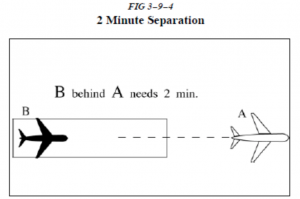
f. Separate IFR/VFR aircraft taking off behind a heavy jet/B757 departure by 2 minutes, when departing:
NOTE − Takeoff clearance to the following aircraft should not be issued until 2 minutes after the heavy jet/B757 begins takeoff roll.
1. The same runway. (See FIG 3−9−4.)
2. A parallel runway separated by less than 2,500 feet.
g. Separate an aircraft from a heavy jet/B757 when operating on a runway with a displaced landing threshold if projected flight paths will cross− 2 minutes when:
1. A departure follows a heavy jet/B757 arrival.
2. An arrival follows a heavy jet/B757 departure.
h. Air traffic controllers must not approve pilot requests to deviate from the required wake turbulence time interval if the preceding aircraft is a heavy jet/B757.
i. Separate a small aircraft behind a large aircraft that has departed or made a low/missed approach when utilizing opposite direction takeoffs on the same runway by 3 minutes unless a pilot has initiated a request to deviate from the 3−minute interval. In the latter case, issue a wake turbulence advisory before clearing the aircraft for takeoff. Controllers must not initiate or suggest a waiver of the 3−minute rule.
NOTE − A request for takeoff does not initiate a waiver request.
REFERENCE − FAAO JO 7110.65, Appendix A, Appendix B, and Appendix C, Aircraft Information.
j. Separate aircraft behind a heavy jet/B757 that has departed or made a low/missed approach when utilizing opposite direction takeoffs or landings on the same or parallel runways separated by less than 2,500 feet− 3 minutes.
k. Inform an aircraft when it is necessary to hold in order to provide the required 3−minute interval.
PHRASEOLOGY −
HOLD FOR WAKE TURBULENCE.
REFERENCE − FAAO JO 7110.65, Para 3−9−7, Wake Turbulence Separation for Intersection Departures.

