
Abstract Syntax Notation One – (ASN.1) ACARS – A standard definition approach that is consistent with the ISO orientation of the ATN and specific ATN Manual Guidelines:
- Aircraft Communications Addressing and Reporting System
- Aircraft Communications and Reporting System
- Aeronautical Radio Incorporation (ARINC) Communications Addressing and Reporting System
Accuracy – The degree of conformance between the estimated or measured position and / or velocity and / or time of/at a platform and its true position and/or velocity and the true time. Radio navigation system accuracy is usually presented as a statistical measure of system error and is specified as:
- Predictable: The accuracy of a position with respect to the geographic or geodetic coordinates of the earth.
- Repeatable: The accuracy with which a user can return to a position whose coordinates have been measured at a previous time with the same navigation system.
- Relative: The accuracy with which a user can determine one position relative to another position regardless of any error in their true positions. In the context of the final approach phase of operation, accuracy may be more generally defined as the ability of the total system to maintain the aircraft position within a total system error (TSE) with a 95 percent probability and to stay within a specified aircraft containment surface which defines the obstacle clearance, terrain avoidance, or aircraft separation criteria for the intended operation. The total system error is based on the 95% probability combination of aircraft and non-aircraft sensor errors, display errors and flight technical errors at each point along the specified procedure. For approach, the outer tunnel shall be used as the obstacle clearance surface.
Active Waypoint – A waypoint to or from which navigational guidance is being provided. For parallel offset, the active waypoint may or may not be at the same geographical position as the parent waypoint. When not in the parallel offset mode (operating on the parent route), the active and parent waypoints are at the same geographical position.
Advanced Air Mobility (AAM) – A transformative vision for the future of aviation, focusing on the integration of innovative aviation technologies into daily life, with the goal of offering new services, enhancing mobility, service delivery, and contributing to a more sustainable transportation system.
Advisory – An annunciation that is generated when crew awareness is required, and subsequent crew action may be required; the associated colour is unique but not red.
Airborne Data Link Processor (ADLP) – An aircraft resident processor that is specific to a particular air-ground data link (e.g. Mode S) which provides channel management, and segments and/or reassembles messages for transfer. It is connected on one side to aircraft elements common to all data link systems, and on the other side to the air/ground link itself.
Aircraft Address – A unique combination of 24-bits available for assignment to an aircraft for the purpose of air-ground communications, navigation, and surveillance.
Aircraft ID – The callsign of the flight as filed in the ICAO flight plan e.g. AZA611 (Mode S).
Air Traffic Controller – A person qualified to provide an air traffic control service.
Alert – An alert is an annunciation of an operating parameter of a navigation system being out of tolerance. Alerts include warnings, cautions, advisories, and integrity alarms.
Along-Track Distance (ATD) – The distance along the desired track from the waypoint to the perpendicular line from the desired track to the aircraft.
Along-Track Error (ATRK) – A fix error along the flight track resulting from the total error contributions.
Alpha numeric call sign – where the suffix consists of:
- number(s) followed by one or more letters; or
- number(s) followed by a combination of letters and numbers.
Altimetry-Aiding – The process of using altitude data to simulate a GNSS satellite directly over the receiver antenna (i.e., it reduces, by one, the number of satellites required for a given function). Barometric altimetry (calibrated pressure) is most likely to be used in civil aircraft because few, if any, have high range radio (radar) altimeters installed.
Ambient Workplace Recording (AWR) – Any type of recording, audio and/or visual, instituted in an air traffic control operations area that records the conversation of controllers and/or the environment within an air traffic control operations room on a continuous basis.
Note: Audio and visual recordings and AWR, together with associated computer data and transcripts of air traffic control communications are intended to provide a record of such communications for use in the monitoring of air traffic control operations, and the investigation of incidents and accidents.
Applications – Specific use of systems that address particular user requirements. For the case of GNSS, applications are defined in terms of specific operational scenarios such as the support of en-route navigation or low- visibility aircraft taxiing.
Approach Intercept Waypoint (APIWP) – A variable waypoint used, if needed, to link an LNAV/VNAV flight plan path with an ILS or DGNSS Instrument Approach’s Final Approach Segment. (Typically used to provide such linkage inside the Final Approach Fix, e.g., on a 3-mile final from the Runway Intercept Waypoint).
Approach Path Monitor (APM) – A ground-based Safety Net intended to warn the controller about increased risk of controlled flight into terrain accidents by generating, in a timely manner, an alert of aircraft proximity to terrain or obstacles during final approach.
Area Navigation (RNAV) – Application of the navigation process providing the capability to establish and maintain a flight path on any arbitrary chosen course that remains within the coverage area of navigation sources being used. RNAV utilising capabilities in the horizontal plane only is called 2D RNAV, while RNAV which also incorporates vertical guidance is called 3D RNAV.
Area Navigation Route (RNAV Route) – An en-route segment, arrival or departure route (including RNAV SIDs and STARs). It may also include en-route segments established with gaps in station coverage for use by RNAV-equipped aircraft capable of automatic dead reckoning.
- The en route phase is normally construed as operations either on RNAV routes designated as high-low altitude routes, or direct point-to-point operations between designated waypoints.
- The terminal phase is considered as the transition from the departure runway to the first en route waypoint or the transition from the en route phase of the last en route waypoint until the initial approach fix/waypoint. A nominal value for the extent of the terminal phase would be that airspace extending approximately 50 miles from the departure or arrival airport.
- The approach phase is that portion of the flight starting at the initial approach fix/waypoint and terminating at the missed approach point. Normally, the final approach fix/waypoint is located within 10 miles from the runway threshold. The missed approach area is included in the approach phase in order to define accuracy requirements.
Area Proximity Warning (APW) – An alert provided to a controller of the imminent incursion of a flight into “special-use” airspace.
Note: The response to such a warning will be dictated by the nature of the airspace in question and its specific requirements.
ATC Control Authority – Person responsible for separation of aircraft (controller).
ATC Data Authority – ATC ground system peer used by the ATC Control Authority.
ATC Ground System Peer – Peer end-system with ATCComm for a given connection.
Audio and visual recordings – See Ambient Workplace Recording (AWR).
Automatic Dependent Surveillance (ADS) – When an electromechanical device, after activation, requires no human involvement to supply dependent surveillance data.
Automatic Dependent Surveillance Broadcast (ADS-B) – Uses Mode S long squitter formats to broadcast aircraft position. The position is “heard” by a Ground Interrogator Receiver Unit (GIRU) on the ground and forwarded on to ATC.
Availability –
- The availability of a navigation system is the ability of the system to provide the required guidance at the initiation of the intended operation.
- Availability risk is the probability that the required guidance will not be present at the initiation of the intended operation.
- Availability is an indication of the ability of the system to provide useable service within the specified coverage area.
- Signal availability is the percentage of time that navigational signals transmitted from external sources are available for use.
- Availability is a function of both the physical characteristics of the environment and the technical capabilities of the transmitter facilities.
Avoidance Procedure – In relation to LAHSO/CROPS, an Avoidance Procedure is a designed procedure to prevent aircraft collision but does not necessarily use an air traffic control (ATC) separation standard.
Note: The Avoidance Procedure shall demonstrate the required safety established by safety analysis and then be formally approved for use.
Barometric Altitude – Geopotential altitude in the earth’s atmosphere above mean standard sea level pressure datum surface, measured by a pressure (barometric) altimeter.
Broadcast – The protocol within the Mode S system that permits uplink messages to be sent to all aircraft in cover, and downlink messages to be made available to all interrogators that have aircraft wishing to send the message under surveillance.
Caution – An annunciation that is generated when immediate crew aware subsequent crew action will be required; the associated colour is amber/yellow.
C-Band – Approximately 5 000 MHz.
Centre of Navigation – The mathematical point referenced to the associated with the DGNSS navigation solution. This point would typically of the GNSS antenna but could also be an offset or translated point (e.g., might be translated vertically to the level of the wheels of a large aircraft).
Comm-A – A 112-bit interrogation containing the 56-bit MA message field. This field is used by the uplink SLM and broadcast protocols.
Comm-B – A 112-bit reply containing the 56-bit MB message field. This field is used by the downlink SLM, ground-initiated, and broadcast protocols.
Comm-C – A 112-bit interrogation containing the 80-bit MC message field. This field is used by the extended length message (ELM) uplink protocol.
Comm-D – A 112-bit reply containing the 80-bit MD message field. This field is used by the extended length message (ELM) downlink protocol.
Communication Failure – A breakdown or unintentional downgrade in the designated means of air-ground communication required for ATS.
Conflict Detection Tools (CDTs) – Computer based controller tools that identify conflicts and then provide system generated conflict advice to controllers. They can provide conformance monitoring to ensure that aircraft comply with instructions issued to resolve a detected conflict.
Connection – Transport Layer Relationship between peer end-systems.
Connection Management – Term used to describe the management of ATCComm connections.
Context Management – An independent service that meets ATSC addressing requirements. It provides the mechanism for aircraft and ATC ground system peers to indicate availability to other ATN users and to convey the addresses to be employed. ATCComm interfaces with aircraft CM equipment to provide ATC ground system peers the addresses needed to establish communication with ATCComm.
Continuity [of a system] (COF) –
- The continuity of a system is the ability of the total system (compromising all elements necessary to maintain aircraft position within the defined airspace) to perform its function without non- scheduled interruptions during the intended operation
- The continuity risk is the probability that the system will be unintentionally interrupted and not provides guidance information for the intended operation.
- More specifically, continuity is the probability that the system will be available for the duration of a phase of operation, presuming that the system was available at the beginning of that phase of operation.
Continuous Climb Operations (CCO) – Aircraft operating techniques facilitated by appropriate airspace and procedure design which meet all ATM requirements, allowing the execution of an optimized climb profile.
Continuous Descent Operations (CDO) – Aircraft operating techniques facilitated by appropriate airspace and procedure design which meet all ATM requirements, allowing the execution of an optimized descent profile.
CONTRAN – Brand name for a device to prevent aircraft from blocking each other during transmissions.
Controller Intervention Buffer – The time required for the Air Traffic Controller to intervene ensuring that a collision would be averted in the event that a separation standard being applied breaks down. This will include an allowance:
- to recognize the oversight;
- to formulate a solution;
- to convey instructions to the pilot;
- for the pilot to react and cause the aircraft to achieve the required change of trajectory.
Controller Tools – Functions of an ATM system that enhance a controller’s ability to meet the objectives of ATS. They provide information that assists controllers in the planning and execution of their duties, rather than dictating a course of action.
Converging Runway Operations (CROPS) – The use of converging, but not necessarily intersecting, runways for take-off and/or landing.
Coordinate Conversion – The act of changing the coordinate values from one system to another, e.g., from geodetic coordinates (latitude and longitude) to Universal Transverse Mercator grid coordinates.
Course Setting Error (CSE) – The difference between the desired course setting and the course that is actually set.
Coverage – The coverage provided by a radio navigation system is that surface area or space volume in which the signals are adequate to permit the user to determine position to a specified level of accuracy. Coverage is influenced by system geometry, signal power levels, receiver sensitivity, atmospheric noise conditions and other factors which affect signal availability.
Crisis – State of inability to provide air navigation service at required level, affecting system and/or personnel, following an unusual or unforeseen situation.
Cross-Track Distance (XTK) – The perpendicular distance that the airplane is to the left or right of the desired track.
Decision Altitude/Height (DA/H) – A specified altitude or height (A/H) in the precision approach at which a missed approach shall be initiated if the required visual reference to continue the approach has not been established.
Note 1: Decision altitude (DA) is referenced to mean sea level and decision height (DH) is referenced to the threshold elevation.
Note 2: The required visual reference means that section of the visual aids or of the approach area which should have been in view for sufficient time for the pilot to have made an assessment of the aircraft position and rate of change of position, in relation to the desired flight path.
Dependent runway operation – In relation to LAHSO/CROPS, a dependent runway operation is when a clearance or instruction to a landing or departing aircraft is conditional on an action of another aircraft or vehicle.
Dependent Surveillance – When surveillance data is supplied by object of the surveillance.
Desired Course – Magnetic – A predetermined desired course direction to be followed (measured in degrees from local magnetic north).
Desired Course – Station – A predetermined desired course direction to be followed (measured in degrees from station north).
Desired Course – True – A predetermined desired course direction to be followed (measured in degrees from true north).
Differential GNSS (DGNSS) – Differential GNSS is an augmentation, the purpose of which is to determine position errors at one or more known locations and subsequently transmit derived information to other GNSS receivers in order to enhance the accuracy, integrity of the position estimate.
DIAS Integrity Alarm – Signal indicating an out-of-tolerance condition that might compromise the approach’s containment surface.
Direct Visual Observation – Observation through direct eyesight, not supported by means other than optical aids (glasses/lenses) that correct vision.
Distance Route Mean Square (DRMS) – The root-mean-square value of the distance from the true location point of the position fixes in a collection of measurements. The confidence level depends on the elongation of the error ellipse. As the error ellipse collapses to a line segment, the 2 DRMS confidence level approaches 95 percent (95.4%); as the error ellipse becomes circular, the confidence level approaches 98 percent (98.2%). In navigation system analysis, a 95% confidence level is assumed, thus all error budgets are conservative with respect to the actual obtainable accuracy.
Downlink – A term referring to the transmission of data from an aircraft to the ground. Mode S ground-to-air signals are transmitted on the 1,090 MHz reply frequency channel.
Earth Referenced Navigation (ERN) – Navigation that is dependent on an external navigation source but is not dependent on a single fixed site. ERN may use either time or phase differences from hyperbolic radio navigation systems or satellite sources with earth models (datums) to determine position (normally latitude and longitude) on the surface of the earth. Omega, Loran- C, DME-DME and GNSS are different forms of ERN.
E-learning – The delivery of training over an electronic network (technology facilitated learning) or as stand-alone distance learning with the aid of a computer terminal.
En Route – A phase of navigation covering operations between departure and termination phases. En route phase of navigation has two subcategories:
- en route domestic / continental
- en route oceanic
Estimated Time Over Deviation Alert (ETODA) – Alert provided to a controller to notify a controller that a new estimate is outside specified parameters when compared to a previous estimate.
Extended Final Approach Segment (EFAS) – A segment collinear with the Final Approach Segment, starting at and extending beyond the Glide Path Intercept Waypoint, in the direction opposite from the landing runway.
Extra duty – Any operational or non-operational duty or a combination of both performed outside of the scheduled hours of work which will result in an increased total duty time for the controller. Non-operational duties are other duties for which the controller is not required to exercise the privileges of the controller license which, from time to time, are assigned to a controller (theoretical controller training, investigation, etc.).
Familiarization flights – Also known as “duty flights” or “route experience flights”, are granted by national air carriers on government or ANSP request.
FANS/II – Special Committee for the Monitoring and Co-ordination of Development and Transition Planning for the Future Air Navigation Systems.
Fatigue – A physiological state of reduced mental or physical performance capability resulting from sleep loss or extended wakefulness, circadian phase, or workload (mental and/or physical activity), affecting the subjective state that can impair an air traffic controller’s alertness and ability to perform safety related duties.
Figure of Merit (FOM) – A system generated indication of the quality of the actual navigation performance of the aircraft. This is expressed as an indication of the aircraft position-fixing accuracy. [ICAO FANS Concept, ADSP]. Indicates aircraft position determination accuracy and navigation capability or whether accuracy is better than:
- FOM 0: >30NM
- FOM 1: <30NM
- FOM 2: <15NM
- FOM 3: <8NM
- FOM 4: <4NM
- FOM 5: <1NM
- FOM 6: <0.24NM
- FOM 7: <0.05NM
Final Approach Fix (FAF) – A point in space used to indicate the position at which an aircraft on a standard approach should be stabilised with appropriate guidance being supplied for the Final Approach Segment (Source: FAA).
Final Approach Segment (FAS) – The straight-line segment which prescribes the three-dimensional geometric path in space that an aircraft is supposed to fly on final approach. This segment is defined by two points in space, the Glide Path Intercept Waypoint (GPIWP) and the Threshold Crossing Waypoint (TCWP).
Flight Path Angle (FPA) – The angle that the vertical flight path of the aircraft makes with the local horizontal.
Flight Technical Error (FTE) – The accuracy with which the aircraft is controlled as measured by the indicated aircraft position with respect to the indicated command or desired position. It does not include blunder errors.
Four Eyes Principle (4EP) – Situation where an executive controller is assisted by another appropriately qualified controller monitoring the same area of responsibility as the executive controller.
Frame – The basic unit of data transfer at link level. A frame can include from one to four Comm-A or Comm-B segments, or from two to sixteen Comm-C segments, or from one to sixteen Comm-D segments.
Geocentric – Relative to the earth as a centre, measured from the centre of the earth.
Geodesy – The sciences related to the determination of the size and shape of the earth (geoid) by such direct measurements as triangulation, levelling and gravimetric observations, which determines the external gravitational field of the earth and, to a limited degree, the internal structure.
Geometric Altitude – Height above the local earth surface.
Geometric Dilution of Position (GDOP) – The ratio of position error of a multilateration system. More precisely, it is the ratio of the standard deviation of the position error to the standard deviation of the measurement errors, assuming all measurement errors are statistically independent and have a zero mean and the same standard distribution. GDOP is the measure of the “goodness” of the geometry of the multilateration sources as seen by the observer; a low GDOP is desirable, a high GDOP undesirable. Applied to Loran-C, GDOP is a measure of horizontal accuracy, while with satellite navigation systems
Geostationary – An equatorial satellite orbit that results in a constant fixed position of the satellite over a particular earth surface reference point. (GPS and GLONASS satellites are not geostationary.) Some proposed integrity and augmentation schemes use geostationary satellites.
Glide Path Intercept Waypoint (GPIWP) – Generally located coincident with the point at which the glide slope intercept altitude meets the ILS glide slope. If no ILS glide slope exists; the point is co-located with the Final Approach Fix.
Global Positioning System (GPS) – A space-based positioning, velocity and time system composed of space, control, and user segments.
- The space segment is composed of 21 satellites (plus three operational spares) in six orbital planes.
- The control segment consists of five monitor stations, three ground antennas and a master control station.
- The user segment consists of antennas and receiver-processors that provide positioning, velocity, and precise timing to the user.
GNSS Augmentation – Technique of providing the system with input information, extra to that derived from the main constellation(s) in use, which provides additional range/pseudo-range inputs or corrections to, or enhancements of, existing pseudo-range inputs. This enables the system to provide a performance which is enhanced relative to that possible with the basic satellite information only.
GNSS Integrity Channel (GIC) – A system that broadcasts civil GNSS integrity information to users in a designated area, based upon measurements made by a ground-based monitor or network of monitors.
GNSS Planned Non availability – The proportion of time that the signals-in-space service of the GNSS is not useable taking into consideration scheduled outages only.
GNSS Random Non availability – The proportion of time and space over the area of interest when the services of the GNSS are not useable to support the required navigation performance.
Note 1: When referred to a selected point, rather than a defined area, GNSS random non availability is the portion of time that the services of the GNSS are not supporting the required navigation performance at this selected point.
Note 2: GNSS random non-availability excludes planned non-availability.
GNSS Time – The overall time reference for and transmitted by the GNSS. GNSS time is precisely related to UTC but does not follow leap seconds.
Graphic Weather Service (GWS) – Provides an en route strategic weather service by way of scalable graphics.
Ground Data Link Processor (GDLP) – A ground-resident processor that is specific to a particular air-ground data link (e.g. Mode S) which provides channel management, and segments and/or reassembles messages for transfer. It is connected on one side (by means of its DCE) to ground elements common to all data link systems, and on the other side to the air/ground link itself.
Ground-initiated Comm-B (GICB) – The ground-initiated Comm-B protocol allows the interrogator to extract Comm-B replies from the transponder containing data from a defined source in the MB field.
Ground Speed (GS) – The speed of an aircraft measured by the distance the airplane travels over the ground, measured in nautical miles per hour (knots).
Height Above – Specifically, the height above the Runway Intercept Waypoint.
Horizontal Dilution of Precision (HDOP) – The ratio of user-referenced horizontal position error to measurement error of a multilateration system.
Human Factors – The human aspects of the working environment.
Hybrid – A navigation system relying on a combination of navigation sources.
Independent runway operation – In relation to LAHSO/CROPS, an independent runway operation is when a clearance or instruction to a landing or departing aircraft is not conditional on an action of another aircraft or vehicle.
Independent Surveillance – Surveillance that does not depend on any action by object of the surveillance.
Initial Missed Approach Segment – A segment extending from the Runway Intercept Waypoint to the Initial Missed Approach Waypoint. This segment is primarily used for lateral guidance during an initial missed approach until other missed approach criteria become effective.
Initial Missed Approach Waypoint (IMAWP) – A 3-dimensional, high-precision waypoint located in the near vicinity of the runway used to establish the Initial Missed Approach Segment.
Initial Operational Capability (IOC) – The equipment and facilities, operational procedures, and training, on the ground and in the aircraft, required to achieve the first benefits in routine flight operations (i.e., a few aircraft operating in selected environments).
Instrument Approach Waypoints – Position fixes that may be used in defining RNAV approach procedures are the:
- Initial Approach Waypoint (IAWP)
- Intermediate Waypoint (INWP)
- Final Approach Waypoint (FAWP)
- Missed Approach Waypoint (MAWP)
- Runway Waypoint (RWY WP)
- Holding Waypoint.
Integrity –
- The integrity of a system is that quality which relates to the trust which can be placed in the correctness of the information supplied by the total system.
- Integrity risk is the probability of an undetected (latent) failure of the specified accuracy.
- Integrity includes the ability of the system to provide timely warnings to the user when the system should not be used for the intended operation.
Integrity Monitoring – GNSS integrity monitoring is a GNSS subsystem which enables the timely detection and indication of malfunctions in GNSS operations to ensure the user is aware of whether or not the system is operating within its specified performance limits.
Intrinsic Safety – Safety aspects inherent to the design of the system.
Land And Hold Short Operations (LAHSO) – An operation that has an Air Traffic Control (ATC) requirement for a landing aircraft to stop short of the full length of the runway.
L-Band – Approximately 1,500 MHz.
Linear Accident Model – An accident model, where the relation between cause and outcome is (simplistically) defined linear. This method is best used in systems with a low complexity.
Lone Person Operation (LPO) – Operations where an ATCO is providing a service with no other person available on the unit, ATCO or otherwise.
Manoeuvre Anticipation – A means, achieved either by equipment mechanisation or procedurally, by which path changes are initiated in either 2D or 3D navigation.
Mask Angle – A fixed elevation angle referenced to the user’s horizon below which satellites are ignored by the receiver software. Mask angles are used primarily in the analysis of GNSS performance and are employed in some receiver designs. The mask angle is driven by the receiver antenna characteristics, the strength of the transmitted signal at low elevations, receiver sensitivity and acceptable low elevation errors.
Maximum Allowable Warning Rate – The maximum allowable warning rate of a system is the upper bound of total warning rate (all sources of warnings that the system can generate) with the system in normal operation.
Message – Basic unit of information exchanged between ATCComm and the ATC ground system peer.
Message Element – A component of a message used to define the context of the information exchanged.
Message Header – Control information used to maintain synchronisation between ATCComm and the ATC ground system peer.
Message Identification Number – A unique number assigned to each message. This number is used to differentiate messages and is conveyed in the message header.
Message Reference Number – Used to uniquely associate a response with a previously received message.
Minimum Safe Altitude Warning (MSAW) – A ground-based safety net intended to warn the controller about increased risk of controlled flight into terrain accidents by generating, in a timely manner, an alert of aircraft proximity to terrain or obstacles.
Minimum Useable Elevation Angle – The minimum satellite elevation, above the user’s local horizon, that the satellite can be reliably used in the calculation of a navigation solution. The minimum useable elevation angle varies depending on the environment, the antenna design and placement, aircraft altitude and attitude.
Missed Approach – An instrument-based procedure that a pilot has to follow after initiating a go-around at or above the Decision Height or Minimum Descent Height.
Mixed Mode Operations – ATM Operations that require different procedures due to variances in airspace users’ characteristics and/or ATM design within the same area of controller responsibility.
Mode S Specific Protocol (MSP) – A Mode S specific protocol that provides a restricted datagram service within the Mode S subnetwork.
Mode Select Transponder (MODE S) – Transponder that is capable of modes “A” & “C” (SSR & Data Link).
Multi Sector Planning (MSP) – Situation where two or more executive controllers working different sectors are assisted by another appropriately qualified controller.
Multisensor Navigation – Where aircraft position is determined using data derived from two or more independent sensors (e.g., Loran-C, VOR, Omega) each of which is useable (i.e., meets required navigation performance including accuracy, availability, and integrity) for airborne navigation.
Navigation – The means by which an aircraft is given guidance to travel from one known position to another known position. The process involves referencing the actual aircraft position to a desired course.
Navigation Guidance – The calculation of steering commands to maintain the desired track from the present aircraft position to a new position.
Navigation Information – The calculation and display of aircraft present position, velocity vector and related data, such as track angle, ground speed and drift angle.
Non-Precision Approach – A standard instrument approach procedure in which no glideslope / glidepath is provided.
Occupancy Counts – The number of flights occupying a sector simultaneously during a specified period of time.
Oceanic Clearance Message (OCM) – This service provides automated assistance for requesting and delivering an oceanic clearance.
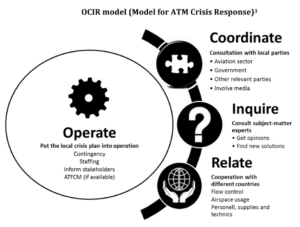
OCIR Model – A practical method for ATC crisis management. It describes four steps in incident stabilization and control. As the primary reaction to any disruption is directed inwards in the organization to regain control, the OCIR model suggests a broader focus by communicating, consulting and cooperating with external parties in all phases of crisis response.
Operational Duty – The period which a controller is actually exercising the privileges of the controller’s licence at an operational position.
Packet – The basic unit of data transfer among communications devices within the network layer, (e.g. an ISO-8208 packet or a Mode S packet).
Parent Waypoint – A waypoint used for route definition and/or progress reporting. The geographical position of a parent waypoint is not altered when RNAV equipment is operated in a parallel offset mode.
Path Following Error (PFE) – That portion of the guidance signal error which could cause aircraft displacement from the desired course or glide path. These perturbations fall within the loop guidance bandwidth of an aircraft. The path following error is composed of the path following noise and the mean course error, in the case of azimuth functions, or the mean glide path error, in the case of elevation functions. The PFE is measured by filtering the output flight navigation error record with a second order low pass filter with a comer frequency of 0.5 radians per second lateral guidance and 1.5 radians per second for vertical guidance and a slope of 12 dB/octave for both cases.
Phase of Operation – A phase of operation is a period of navigation with a constant required navigation performance. Traditionally, the term “phase of flight” has related to periods of navigation with different procedures/criteria such as en route (continental, oceanic), terminal, approach, and landing. As the RNP concept is introduced, “phase of operation” will relate more to a particular RNP. For example, in the future, the continental en route phase of flight may be divided into more than one phase of operation, since several RNPs may be included as an aircraft transits a continental area.
Position Determination Error – The accuracy with which a navigation sensor can calculate and provide an output of actual location in an operational environment.
Position Dilution of Precision (PDOP) – The ratio of user-referenced three-dimensional position error to measurement error of a multilateration system. PDOP is the root-sum-square of HDOP and VDOP.
Position Fix – A derived location of an entity in a common coordinate system.
Position Fixing Error – The accuracy with which a navigation sensor in combination with a navigation computer can calculate and provide an output of actual location in relation to desired location in an operational environment.
Positive Safety Culture – A positive safety culture is defined by values, attitudes and behaviour that are committed to the organisation’s safety efforts and is achieved through the combination of technical competence that is continuously enhanced through training and education, effective communications and information sharing.
Precision Approach – A standard instrument approach procedure in which a glideslope / glidepath is provided.
Predictable Accuracy – The accuracy of a position with respect to the geographic or geodetic coordinates of the Earth.
Propagation Delay – The time delay of a signal created as the signal travels between antennas through a propagation medium.
Pseudolite – A pseudolite (pseudo-satellite) is a ground-based GNSS augmentation which provides, at GNSS satellite signal-in-space frequencies, an additional navigation ranging signal. The augmentation may include additionally differential GNSS corrections. (Adapted from the FANS GNSS Technical Subgroup).
Pseudo-range (PR, PRC) – The distance from the user to a satellite plus an unknown user clock offset distance. With four satellite signals it is possible to compute position and offset distance. If the user clock offset is known, three satellite signals would suffice to compute a position.
Radar monitoring – A continual process of observation carried out via a radar display, to facilitate the application of regulation and control.
Radionavigation – The determination of position, or the obtaining of information relating to position, for the purposes of navigation by means of the propagation properties of radio waves.
Receiver Autonomous Integrity Monitoring (RAIM) – A technique whereby a civil GNSS receiver/processor determines the integrity of the GNSS navigation signals without reference to sensors or non-DoD integrity systems other than the receiver itself. This determination is achieved by a consistency check among redundant pseudo-range measurements.
Reference VOR/DME Facility – The VOR/DME (VORTAC) (TACAN) facility with its designated latitude/longitude position used for the identification and establishment of an RNAV route or flight procedure.
Rejected Landing – A “Rejected”, or “Baulked Landing” is a manoeuvre where the pilot, after having passed the minimum of an IFR approach, aborts the landing, and initiates a go-around, or is asked by ATC to go around.
Relative Accuracy – The accuracy with which a user can determine one position relative to another position, regardless of any error in their true positions.
Reliability – The probability of performing a specified function without failure under given conditions for a specified period of time.
Repeatable Accuracy – The accuracy with which a user can return to a position whose coordinates has been measured at a previous time with the same navigation system.
Required Navigation Performance (RNP) – A parameter describing lateral deviations from assigned or selected track as well as along track position fixing accuracy on the basis of an appropriate containment level (1, 4, 12.6, or 20NM).
Route Conformance Monitoring System (RCMS) – Function of an automated ATS system that monitors the position of an aircraft to detect when it deviates from its route. An RCMS is considered to be a controller tool.
Route Deviation Alert (RDA) – An alert provided to a controller to notify that an aircraft’s position is displaced outside the tolerances defined within RCMS.
Note: Certain processing may be suspended.
Route Segment – Two subsequently related waypoints (or ATD fixes) define an RNAV route segment.
Runway End Waypoint (RWEWP) – A 3-dimensional, high-precision waypoint at the landing rollout end of the runway. The RWEWP, if needed, will be used to define rollout courses, runway remaining, etc.
Runway Intercept Waypoint (RWIWP) – A 3-dimensional, high precision waypoint located at the present GPIP, or at a standard “down runway” distance (e.g., 1000 ft point).
Runway Segment – The segment between the Runway Intercept Waypoint and the Runway End Waypoint.
Safety I Approach to Safety – The number of things that go wrong (accidents / incidents) is as low as possible. This approach is achieved by first finding and then eliminating or weakening the causes of adverse outcomes, resulting in norms and guidelines.
Safety II Approach to Safety – A method of ensuring safety in a system, where the aim is to ensure resilience. Understanding that the system is too complex to foresee and mitigate all that might go wrong, the system needs to be engineered in such a way, that the variable factor (human operators) can intervene. Safety is the ability to succeed under varying conditions. Safety II requires an understanding of everyday performance.
Safety Nets – An integral part of the ATM system that is imperative to air traffic safety. Airborne or ground based function, the sole purpose of which is to alert the pilot or controller of an imminent situation such as the collision of aircraft or aircraft to terrain. Safety Nets, using primarily surveillance data, shall provide sufficient warning times to allow appropriate action to be taken to prevent the collision of aircraft or aircraft to terrain. For airborne systems, this includes, but not limited to the Airborne Collision Avoidance System (ACAS). For ground-based systems, this includes, but is not limited to Short Term Conflict Alert (STCA), Minimum Safe Altitude Warning (MSAW), Airspace Proximity Warning (APW), Approach Path Monitor (APM) and Runway Incursion Monitoring.
Safety Net Alert – A unique and distinguishable audible and/or visual annunciation, provided by an ATM system to a controller, indicating that a safety net is triggered.
Satellite Health – The ability of the satellite’s navigation signal for unaugmented (stand-alone) GNSS navigation.
Secondary Sensor – Any input from other aircraft systems that may be used to derive navigation information.
Sector Capacity – The maximum number of flights that may enter a sector per hour averaged over a sustained period of time, to ensure a safe, orderly and efficient traffic flow.
Segment – A portion of a message that can be accommodated within a single MA/MB field in the case of an SLM or a single MC/MD field in the case of an ELM.
Segregation – The application of procedures and design with the purpose of setting apart an exclusive subset of users of the ATM system, based on a defined operational characteristic.
Selective Availability (SA) – A set of techniques for denying the full accuracy and selecting the level of positioning, velocity, and time accuracy of GPS available to users of the Standard Positioning Service (L1 frequency) signal.
Separation – The action within defined airspace of keeping aircraft at such displacements from defined hazards that the risk of collision is limited to an acceptable safe level.
Separation Assurance – The design and application of airspace and procedures that actively maintain the appropriate separation minima between aircraft.
Service Coverage – The coverage provided by a radio navigation system in that area or space volume in which the signals are adequate to permit the navigator to determine position to a specific level of accuracy. Coverage is influenced by system geometry, signal power levels, receiver sensitivity, atmospheric noise conditions and other factors which affect signal availability.
Short Term Conflict Alert (STCA) – An automated system that predicts reduction of aircraft spacing to below specified parameters. An STCA function can be used as either a controller tool (STCA-T) or a safety net (STCA-N) depending upon system parameters.
Signal-Derived Position Error – That part of the horizontal position error at the user location attributable to signal-in-space errors from the GNSS control segment, space segment and propagation effects; does not include receiver-induced errors.
Signal-Derived Range Accuracy – Measured pseudorange error on a particular satellite as observed by a ground monitor station. SRA includes the sign of the error.
Simultaneous Intersecting Runway Operations (SIRO) – The simultaneous use of intersecting runways for take-off and/or landing.
Situational Awareness – An integrated understanding of factors that contribute to the operation of aircraft / vehicles under normal and abnormal conditions. Factors affecting situational awareness include spatial awareness, awareness of environment, vehicle performance awareness, aircraft/vehicle systems awareness, and operator / crew / controller awareness.
Slant Range – The actual straight-line distance between an aircraft in flight and a ground location (radar, DME). This distance is greater than the geographical surface range because of the altitude.
Slant Range Error (SRE) – Slant range error is the difference between the distance of an aircraft (Point A) to a DME station on the surface (Point B) and the distance from the station (Point B) to a point directly beneath the aircraft on the surface (Point C). The error magnitude is a function of aircraft altitude above the station and the distance to the station.
Sole Means of Navigation – A means of navigating the aircraft where position determination is provided by a system which satisfies the required navigation performance (RNP) for a particular phase of operation.
Spacing – The application of a displacement equal to or greater than a specific separation minimum between an aircraft and a hazard.
Special Use Airspace – a generic term used for airspace volumes designated for specific operations, such as military training, exercises and operations, of a nature such that required limitations on airspace access may be imposed on other aircraft not participating in those activities. These may include, but are not limited to, restricted, danger and prohibited areas or temporary reserved areas (TRA).
Stand-Alone GNSS System – An airborne GNSS configuration which may use altimeter aiding and augmented GNSS signals without reliance on any other navigation system or sensor.
Standard Length Message (SLM) – An exchange of digital data using selectively addressed Comm-A interrogations and/or Comm-B replies.
Standard Positioning Service (SPS) – The standard specified level of positioning, velocity and timing accuracy that is available, without qualifications or restrictions, to any user on a continuous world-wide basis.
Station North – The assigned north reference for a particular station.
Station-Referenced Navigation – Position determination that is referenced to a stationary fix.
Strategic nap – Short period of sleep taken at specific times during a night shift. Recommended duration of a strategic nap varies from maximum 20 minutes for a nap early in the night to maximum 50 minutes late in the night (after 4AM).
Subnetwork – An actual implementation of a data network which employs a homogeneous protocol and addressing plan, and is under the control of a single authority.
Supplemental Air Navigation System – An approved navigation system that can be used in controlled airspace of the National Airspace System in conjunction with a sole means navigation system.
Surveillance – The acquisition and monitoring of objects’ positions and/or other relevant data for the purpose of Air Traffic Management, such as identity, movement, and intent.
Systemic Accident Model – An accident model, where multiple relations and correlations are considered and mapped. This model is imperative to understand complex models with multiple factors.
Tactical Safety – Safety aspects related to the application of procedures and to the adoption of defences, where the design of the system is inadequate to achieve a given safety level.
Terminal Area – A general term used to describe airspace in which approach control service or airport traffic control service is provided.
Terminal Weather Information for Pilots (TWIP) – Provides a cockpit display to pilots of convective weather information in specific terminal areas.
Third Party Risk – The probability that individuals on the ground are affected by aircraft accidents.
Threshold Crossing Height (TCH) – The height of the straight-line extension of the glide path above the runway at the threshold.
Threshold Crossing Waypoint (TCWP) – A three-dimensional, high-precision waypoint typically located 50 to 55 feet above the runway threshold. This height may vary depending upon the specific airport configuration.
Time Navigation (TNAV) – A function of RNAV equipment that provides the capability to arrive/depart at a waypoint at a specified time. When added to a 3D system, TNAV is called 4D.
Time to Alert – The maximum allowable time interval between system performance going outside of operational performance limits and the appropriate integrity monitoring subsystem providing an alert.
TO-FROM Equipment – RNAV equipment in which the desired path over the ground is defined as a specific (input quantity) course emanating either to or from a particular waypoint. In this equipment, the aircraft may fly either TO or FROM any single designated waypoint.
TO-TO Equipment – RNAV equipment in which a path is computed that connects two waypoints. In this equipment, two waypoints shall always be available, and the aircraft is usually flying between the two waypoints and TO the active waypoint.
Total System Error (TSE) –
Generic: The root-sum-square of the navigation source error, airborne component error, display error, and flight technical error.
Specific: The root-sum-square of the position fixing error, display error, course selection error, and flight technical error.
Traffic Information Service (TIS) – Provides a cockpit display of traffic information of all targets within 7NM of the aircraft requesting the information. TIS processes Mode S surveillance data from the ground and display the data on a TCAS I-like display.
True Airspeed (TAS) – The actual speed of an aircraft relative to the air through which it is flying corrected for temperature and air density.
Turn Point (TP) – A waypoint which identifies a track change from one desired track to another along a given route.
Two Eyes Principle (2EP) – Operations where an ATC unit provides service with one ATCO per sector, but with at least one more equally qualified ATCO on duty and available to assist or provide breaks.
Unmanned aircraft system traffic management (UTM) – A specific aspect of air traffic management which manages UAS operations safely, economically, and efficiently through the provision of facilities and a seamless set of services in collaboration with all parties and involving airborne and ground-based functions.
Unmanned aircraft system traffic management (UTM) system – A system that provides UTM through the collaborative integration of humans, information, technology, facilities, and services, supported by air, ground or space-based communications, navigation and surveillance.
Uplink – A term referring to the transmission of data from the ground to an aircraft. Mode S ground-to-air signals are transmitted on the 1,030 MHz interrogation frequency channel.
User Range Accuracy (URA) – The one-sigma estimate of user range errors in the navigation data for each individual satellite. It includes all errors for which the space or control segment is responsible. It does not include any errors introduced at the user set.
Vertical Deviation (VDEV) – The deviation of the aircraft above or below the vertical profile as displayed on an indicator such that deflection is up when the aircraft is below the vertical profile.
Vertical Dilution of Precision (VDOP) – The ratio of user-referenced vertical position error to measurement error of a multilateration system (see GDOP for a more detailed description).
Vertical Navigation (VNAV) – A function of RNAV equipment which calculates displays and provides guidance to a vertical profile or path.
Vertical Profile (VP) – A line or curve, or series of connected lines and/or curves in the vertical plane, defining an ascending or descending flight path either emanating from or terminating at a specified waypoint and altitude, or connecting two or more specified waypoints and altitudes. In this sense, a curve may be defined by performance of the airplane relative to the air mass.
Vertical Profile Angle Error (VPAE) – The difference in degrees that the current aircraft flight path angle makes with the vertical profile.
Vertical Profile Intercept Point (VPIP) – The point at which the current aircraft flight path angle intercepts the vertical profile.
Vertical Take-Off and Landing (VTOL) – A power-driven, heavier-than-air aircraft, other than aeroplane or rotorcraft, capable of performing vertical take-off and landing by means of lift and thrust units used to provide lift during take-off and landing.
Vertiport – An area of land, water or structure that is used or intended to be used for landing, take-off and movement of VTOL-capable aircraft.
Warning – An annunciation that is generated when immediate recognition and corrective or compensatory action is required; the associated colour is red.
Waypoint (WP) – A predetermined geographical position used to define routes and / or progress reporting fixes that is defined by latitude and longitude and/or relative to a VORTAC or VOR/DME reference facility by magnetic radial bearing and range in nautical miles.
Waypoint Displacement Area – The rectangular area formed around the plotted position of the waypoint. The rectangle is oriented along the desired track with the waypoint at its centre. Its dimensions are two times the appropriate plus-or-minus along- track and cross-track displacement error values.
Wind Angle (WA) – The direction from which the wind is blowing measured in degrees from true or magnetic north.
Wind Speed (WS) – The speed with which the wind is blowing measured in knots.

