
44TH ANNUAL CONFERENCE, Melbourne, Australia, 17-22 April 2005WP No. 86Investigate interactions between Traffic Collision Avoidance System and Mode SPresented by TOC |
Introduction
1.1 The carriage of a functioning Mode S transponder is a basic requirement for any Traffic Collision Avoidance System (TCAS) equipped aircraft. With a Mode S transponder fitted, the aircraft is able to communicate not only with ground radars, but also make exchanges Air-Air. This is often referred to as “squitter”. Another AirAir application is the “TCAS-TCAS coordination”. Additionally, a Mode S transponder enables an aircraft to receive and to transmit shorter, and even longer data link messages.
1.2. Mode S transponders are very flexible and versatile communication systems and their use becomes more and more widespread. This is particularly true in high density continental airspaces where the 4096 Mode A SSR codes are becoming a very serious limiting factor for ATM and airspace capacity. Even for low density and partly uncontrolled areas, Mode S brings significant surveillance improvements. Namely with Automatic Dependent Surveillance Broadcast (ADS-B) and Traffic Information Service Broadcast (TIS-B) applications. This is enhancing either situational awareness for the air crew, or is offering alternate and less costly surveillance techniques than ground radars.
1.3. Despite the progress made in the use of Mode S, it becomes more and more evident that Mode S is currently passing a period of drawbacks and technical problems. This is very true for the airborne element, the Mode S transponders. Due to a lack of concise and stringent operational specifications, many Mode S transponders show detection issues. Some are even completely invisible to Mode S ground radars. In Europe, Mode S tests have indicated that a lot of fine tuning and improvement is still necessary before a full radar service based solely on Mode S becomes feasible and safe.
Discussion
2.1. SSR Mode S is the latest generation of the ground-based secondary radar surveillance system. In addition to SSR Mode A/C and Mode S surveillance capability, Mode S supports data link messaging and is defined as an Aeronautical Telecommunications Network (ATN) compliant sub network. A Mode S transponder is a “multi communication” medium that provides for a datalink protocol, error detection and correction which ensures message integrity. Additional to the datalink capability, also identification and altitude data are exchanged.
2.2. Even in its basic version, the Mode S transponder is able to transmit much more data and information than a standard SSR-transponder. Some other additional features are message prioritization and the capability for an aircraft to communicate with multiple sensors. This is very important for the TCAS applications. Generally, the datalink capabilities of a Mode S transponder has so-called UF and DF functions. UF stands for “uplink formats”, meaning receiving (in-coming messages). And DF is standing for “downlink formats” where messages are sent out. The interrogation uses the frequency of 1090 MHz and the reply, either to another aircraft (air to air), or to ground, is made on 1030 MHz and is called “downlink format”.
2.3. Additional Mode S data are for instance the unique 24-bit address of the airframe. Also, the mode S altitude is transmitted in 25 feet increments, compared to the 100 feet quantification of normal Mode A/C transponders. This is of course only beneficial and an improvement if the airborne aircraft altitude data source, basis of the altitude report, is also of 25 feet (or better). For this reason, ICAO’s Surveillance and Conflict Resolution Systems Panel (SCRSP) has recently proposed to ICAO to mandate a world wide requirement for onboard aircraft data sources to use 25 feet increments as well. Other TCAS-Mode S problems, in particular in “RA reversal situations”, are the use of old 100 feet incremental altitude source data processors on the airborne side that are feeding the Mode S transponders that would support 25 feet reports (“Gilham error”). This will help to improve TCAS detection and give better performance. If this proposal is accepted by ICAO, then all new aircraft will have to meet this requirement as soon as possible. For existing airframes, a final deadline will have to be set (around 2009) to comply as well with the new standard.
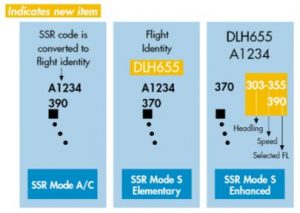
Mode S transponders must also have Mode A and C capabilities. The figure above shows information available for display in the data label. The left box is when the label contains only Mode A and C information, that is a four digit code and level information. The ground system must correlate the code into a callsign. The centre box shows Mode A, C and elementary Mode S data block, the Flight Identity is added. The right box shows Mode A,C and some data from the enhanced Mode S data block, in this example Heading, Speed and Selected Flight Level (the level set by the pilot).
2.5 Additionally, the following information is provided by Mode S: aircraft on ground, or aircraft in the air. Normally, this is done by “wiring” the transponder to the landing gear which then is choosing automatically the correct status of a flight. ICAO SCRSP has taken note of the problems that many aircraft pose to the Mode S network as their transponder is incorrectly wired. Therefore, aircraft send out a wrong flight status messages, especially when being on ground. This has some serious implications on the integrity of the ATM system, and more particularly on TCAS. This becomes very important in high density airspaces where TCAS virtually becomes overloaded by replies and therefore must limit its range.
2.6. The use of Mode S is generally divided into two different categories: either “Elementary surveillance” or “Enhanced surveillance”.
Elementary Surveillance is exchanging the following data: Altitude (in increments of 25 feet and the flight plan call sign is automatically downlinked to the ATM system). In Europe it is anticipated that the implementation of Mode S Elementary Surveillance is started in 2005 (March 31, 2005). The plan is to replace about 50 traditional SSR stations by civil Mode S ground stations. All based on the off-the-shelf PreOperational European Mode S (POEMS) stations. The European Mode S Programme is developing a set of common “tools” for Air Navigation Service Providers (ANSPs). Among these tools there are operational procedures, system implementation concepts, safety cases, and regulatory material, including hardware and software components.
Enhanced surveillance adds, in addition to elementary surveillance, the following: down linking of an additional set of downlinked aircraft parameters (heading, speed, selected altitude, etc. etc) supporting a number of new ATM applications, among which the Controller Access Parameter (CAP). Other service and system improvements such as a level bust alerting tool. These all relate to improvements in tactical ATC. So far the following European States are committed to Enhanced surveillance: France, Germany and the United Kingdom. These three States are implementing Mode S enhanced also by March 31st 2005, but they accept a transition period of two years, until 2007. Enhanced surveillance is seen as an enabler for more cooperative ATC, based on increased information exchanges between all ATC partners, and more specifically between the ground and the aircraft.
2.7. In recent studies and tests made in Europe, many problems and issues regarding reception of Mode S transponders were identified, namely:
- incorrect 24 bit ICAO address (according to Annex 10), especially on reregistered aircraft.
- incorrect data block (call sign), making correlation of FPL and data block impossible.
- aircraft in flight report “on ground status”.
- aircraft flying with “on ground status”, rare but possible.
- aircraft that are badly detected by Mode S radars.
- transponders that cannot be detected at all by Mode S radars.
- aircraft are detected twice, the so called “ghost track phenomenon”.
According to EUROCONTROL, all these cases were traced back to Mode S transponders not operating as described in ICAO Annex 10.
It was possible to classify the transponder problems into two different and distinct families:
a) Transponder design problem, where all the transponders of the same family have the same problem
b) Transponder isolated problem, where the deficiencies are not met on all transponders of the same family, but only on isolated units (either real failure or a drift of the factory tuning)
It is expected that all these detection problems of Mode S can be sorted out and eliminated. But it will take some time before an ATM service based solely on Mode S detection becomes feasible and accepted as safe. The fact that new versions of Mode S transponders are still delivered that are not in full compliance with ICAO SARPs is a development that is of concern. SCRSP has proposed that ICAO will address these identified shortcomings and problems of Mode S equipment.
2.8. TCAS/ACAS uses the UF16 and DF 16 formats of Mode S for TCAS-TCAS air to air communication and co-ordination. In a TCAS/TCAS encounter each aircraft transmits interrogations to the other via the Mode S link in order to ensure the selection of complementary resolution advisories (“intent message”). Co-ordination interrogations use the same 1030/1090 MHz channels as surveillance interrogations. Each aircraft transmits a co-ordination interrogation to the other once per second as long as the other aircraft is causing an RA. This information is expressed in the form of a complement: E.g. if one aircraft has selected an “upward-sense” advisory with respect to the threat (a “climb intent”), it will transmit a message in its co-ordination interrogation to the threat, restricting the threat’s solution of RAs to those in the “downward sense.” This is the so-called TCAS-TCAS coordination transmitted and exchanged via Mode S.
2.9. Mode S “extended squitter” , transmitting on 1090 MHz, is an extension of the Mode S standard used, inter alia, by the ACAS. Mode S extended squitter, also sometimes referred to as DF 17, uses a modified Mode S transponder. This is also the case for ADS-B. With ADS-B, each aircraft periodically broadcasts its identification, position and altitude. These broadcasts can be received by ground or airborne sensors. It will take a few years until the larger part of the world fleet is equipped with this new feature (Mode S ES). The Mode S Extended Squitter, has taken Mode S and has added more bits to it. In those bits it transmits position information. Squitter means that the transmission follows on a regular interval without any outside action required.
The extended squitter uses the 112-bit message set and the following information:
- A short squitter transmitted every second to check if the Mode S transponder functions correctly.
- The 24 bit address of the airframe for surveillance purposes.
- The situation of the aircraft (in the air or on ground).
- The position and speed is transmitted twice per second.
- Message identity is transmitted every 5 seconds as it is not foreseen to change often. Some “event messages”, if required (e.g. TCAS RAs). This would be one of the solutions and possibilities to use Mode S extended squitter as means of downlinking TCAS RAs to ATC, if it would become mandated.
2.10. Some additional services and functions are possible with Mode S: Traffic Information Service (TIS) provides many of the functions available in TCAS. Unlike TCAS, TIS is a ground-based service available to all aircraft equipped with Mode S transponders. The advantage of TIS-B is that the ground station can also detect non Mode-S aircraft and integrate them into the transmitted air situation picture. The TIS system uses track reports provided by ground-based Mode S surveillance systems to retrieve traffic information. TIS takes advantage of the Mode S data link to communicate surveillance data to aircraft and presents this information to a pilot in a cockpit display of Traffic information (CDTI). This is a first operational application of ASAS (Airborne Separation Assistance System).
Conclusions
3.1. Mode S and TCAS are systems that are closely linked together, and TCAS is only able to function as required (TCAS II, version 7.0, ICAO SARPs compliant) when a fully operating Mode S transponder is fitted to the airframe.
3.2. Mode S transponders, especially in their upgraded versions, offer many promising and interesting future solutions to surveillance and ATM problems currently at hand. It is expected that if the implementation is well organized and coordinated, that this technology will become a key element to many future world wide surveillance applications. This is equally true for high density continental airspace, as it is true for low density airspaces with inexistent or only partially established ATM service in place.
3.3. Some technical problems and limitations plague the full deployment of the Mode S technology in high density continental airspace right now. There, Mode S is needed to solve many of the capacity issues attributable to Mode A (code shortages and other problems such as garbling or interrogation overload). A vigorous campaign to detect and rectify the problems has started now. It is nevertheless quite worrying to learn that even today new Mode S transponders are coming off the shelf which are still not in full compliance with the ICAO SARPS of Annex 10.
3.4. Some issues of TCAS are linked to Mode S problems or shortcomings. This is the case for incorrect aircraft wiring of Mode S transponders (to determine the “on ground” or “airborne status”). This error overloads the TCAS receivers which are designed to support only a limited number of targets in close range. This is in particular the case in high density airspaces and around busy terminal areas in Northern America. This results in an automatic limitation of the detection and range of the TCAS receivers that feeds the Collision Avoidance Software (CAS). There are investigations underway to find out if the limitations could become so severe that either late RAs or no RAs at all are possible in those critical high density airspaces.
3.5. Some of the altitude issues of Mode S transponders (e.g. “Gilham errors”), and in particular in RA reversal situations, will help to improve TCAS detection and give improved performance. SCRSP has passed now a recommendation to ICAO and its Member States to mandate that the data source feeding the Mode S transponders must as well support altitude determination using 25 feet quantification. This is expected to improve significantly the precision of aircraft altitudes reported by Mode S transponders. This in turn will help to improve TCAS performance, especially in tight RA reversal manoeuvres where the current altitude must be determined with extreme precision.
Recommendation
It is recommended that;
4.1. This paper be accepted as information material.
Last Update: September 29, 2020