
DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
46TH ANNUAL CONFERENCE, Istanbul, Turkey, 16-20 April 2007WP No. 91Surveillance Applications Policy – Applications of Radar MonitoringPresented by TOC |
Summary
This paper is intended to highlight the effect of new technologies and procedures which impact on the use of radar monitoring. The intent of the paper is to identify if such technologies are being used to reduce separation criteria or are adversely impacting on the controllers workload and ability to perform his or her task effectively and safely. The paper looks at approach and en-route applications specifically approaches to Closely Spaced Parallel Runways, Area Navigation and Required Navigation Performance applications, Airborne systems and the use of monitoring tools to assist the controller. It is hoped that Member Associations will be able to use such information when States initiate research into the application of the procedures mentions herein.
Introduction
1.1. This paper stems from the concern, raised by the Technical and Operations Committee (TOC), that controllers may be detrimentally affected by the application of new technologies and procedures which use radar monitoring as a mitigating factor. There is a possibility that such procedures set criteria below the current separation standards.
This paper is intended to provide guidance material highlighting those technologies and procedures which are affecting radar monitoring, the limitations and risks of such procedures and the impact they have on the controller’s radar monitoring role.
Discussion
2.1. Airlines, airport companies and Air Traffic Service (ATS) providers are all looking for ways of extracting greater capacity out of airspace and aerodromes that are reaching maximum capacity under the existing procedures and infrastructure. Current record fuel costs have added greatly to the calls for greater efficiency in routing, flight profiles and overall flight time. Many airlines question why such efficiencies can not be instantly obtained, citing the equipage of the fleets they fly. However in many cases these fleets are at least a generation ahead in technological equipage than the ground based services that control them.
2.2. Closely Spaced Parallel Runway Operations
2.2.1 Closely Spaced Parallel Runways (CSPR) procedures have continued to evolve over the last ten years. The incentives for change still mainly revolve around reduced capacity during adverse weather (loss of pilot’s ability to sight and follow) and overall terminal airspace capacity. Weather in particular can reduce capacity by up to half so identifying and proving methods that allow reduction of the current standards is seen as a cost effective alternative to building new infrastructure.
2.3. Parallel runways with less than 2500 ft spacing
2.3.1 Currently runways with less than 2500ft spacing are considered as one for approach sequencing purposes and normal radar and wake turbulence spacing must be applied between each approach – except in Visual Meteorological Conditions (VMC). However the Federal Aviation Administration (FAA) is looking at means of reducing this requirement for runways down to 700ft centreline spacing. This reduction is based on an assessment of current weather conditions coupled with the aircraft’s wake turbulence category involved in the simultaneous operation. Staggering of runway thresholds would also have an impact.
2.3.2 Assessment would be by controller interpretation of automated Wake Vortex Warning Systems (WVWS) and other weather monitoring tools at the field that would indicate if conditions were suitable to ensure wake protection for any following aircraft.
2.3.3 Application would be as per dependent runway operations with lateral spacing between the approaches at 1.5 NM in applicable cases.
2.3.4 This proposed standard is below the current wake turbulence and radar separation standards and would involve a mixed mode operation of eligible and non eligible aircraft types. Coupled with this is the availability of the procedure as conditions change.
2.3.5 Radar monitoring would be used to insure the defined spacing is maintained on the approach and, at this stage, this appears to be without any specific automated assistance tools or enhanced radar update rates. It would also be with only a single controller monitoring the approach paths.
2.3.6 Simultaneous Offset Instrument Approaches (SOIA) provide another reduction in the minima. This procedure is being applied in the USA in locations such as San Francisco and can be applied between runways between 3000 and 750 ft apart.
2.3.7 SOIA uses a straight in Instrument Landing System (ILS) approach for one runway and an offset Localizer-Type Directional Aid (LDA) approach path for the other. The offset LDA is also angularly offset between 2.5 and 3 degrees from the centreline of the applicable runway.
2.3.8 An LDA Missed Approach Point (MAP) is specified which means if the offset aircraft has not established visual reference of the opposing leading traffic by the MAP then a missed approach must be carried out. This point is when the two approach tracks are 3000ft apart laterally so sets the MAP at a high altitude for the offset approach. Otherwise the requirements of the procedure are as per an independent parallel approach using Precision Radar Monitoring (PRM).
2.3.9 Monitoring is highlighted in the procedures as applied from the moment vertical separation is relaxed until the offset aircraft sights the other traffic or until 0.5 NM beyond the most distant of the two runway departure ends in the case of a missed approach.
2.3.10 Noted also is that controllers cannot issue breakout instructions below the minimum radar vectoring altitude.
2.4. Dependant approaches
2.4.1 ICAO specifies dependant parallel approach separation minima at 3 NM for aircraft on the same approach and a lateral distance between adjacent approaches of 2 NM. This is applicable for parallel runways spaced 3000ft or above.
2.4.2 There is no specific reference to radar monitoring for such approaches. With this approach type separation is maintained via controller monitoring and positive action when spacing is observed to be decreasing to the specified minimum. In the case of an aircraft deviation there is no specific avoidance manoeuvre as for independent approaches. It is the controllers responsibility to vector above radar terrain or initiate a missed approach (when below radar terrain) for situations when separation is expected to fall below the minimum. Monitoring is implied by way of the controller’s responsibility to separate.
2.4.3 ICAO Manual on Simultaneous Operations on parallel or near-parallel Instrument Runways (SOIR) Doc 9643 section 2.3.2.5 confirms this:
“…the radar approach controller monitors the approaches to prevent violation of the required separation”
2.4.4 The ICAO criteria have been further reduced by some states. The FAA approves a 1.5 NM spacing for certain aircraft categories on parallel runways with a centreline spacing of only 2500ft. This is without any enhancements to the controllers monitoring tools and by necessity has a single controller monitoring both approaches.
2.5. Independent Parallel Approaches
2.5.1 ICAO PANS-ATM Doc 4444 Chapter 8.9.2 highlights the controller role with regards to such approaches as a key function of the use of radar in approach control service:
“b) Provide radar monitoring of parallel ILS approaches and instruct aircraft to take appropriate action in the event of possible or actual penetrations of the no transgression zone (NTZ)”
2.5.2 ICAO defined independent parallel operations can now be conducted down to 1035m (3400ft) centreline runway distance. Approaches between 1310m (4300ft) and 1035m (3400ft) are permitted with several provisos the most particular being:
- The specification of the Secondary Surveillance Radar (SSR) equipment that must be used – which must have a 2.5 second update rate or less and a minimum azimuth accuracy of 0.06 degrees;
- The use of a detection and alerting display. This is a high resolution display and must have the ability to display and predict aircraft position and deviations;
- Independent controllers monitoring each approach.
2.5.3 The combination of these components is generally called a PRM.
2.5.4 Additionally there must be a NTZ. This is a buffer between the two approaches of at least 610m (2000ft) that extends from the runway thresholds to the point where vertical separation is relaxed. The NTZ is not actually specified as a separation criterion. For such approaches its purpose is to provide for safe resolution of conflicts.
2.5.5 Primary responsibility for navigation still lies with the pilot. Controllers are responsible for separation while aircraft are outside the NTZ. ICAO PANS-ATM Doc 4444 6.7.3.2.7 Note 1:
“The primary responsibility for navigation on the ILS localizer course and/or MLS final approach track rests with the pilot. Control instructions and information are therefore issued only to ensure separation between aircraft and to ensure that aircraft do not penetrate the NTZ.”
2.5.6 This does not specify the NTZ as a separation form. Therefore it can be argued that this is a segregation procedure and does not apply any radar separation.
2.5.7 ICAO Manual on SOIR Doc 9643 adds weight to this:
“2.2.2.1 Since radar separation is not provided between traffic on adjacent extended runway centrelines in mode 1 approaches there must be a means of determining when an aircraft deviates too far from the ILS localizer course or the MLS final approach track.”
2.5.8 Final approach path tolerances are designed so that either the controller can identify, or the automated predictive system can alert the controller of a deviation and the controller can respond containing the deviating aircraft within the finally approach track area.
2.5.9 Response methods are not specified but could include notifying the pilot and observing a re-conformance or instructions for the pilot to regain track.
2.5.10 Beyond that if an aircraft continues to deviate and penetrates the NTZ (blunders) the situation then becomes a loss of separation. Controller responsibility is then to re- establish a form of separation via the issuance of a breakout turn instruction – a procedure specific to independent approaches. This instruction is applied to the non- deviating aircraft.
2.5.11 ICAO Manual on SOIR Doc 9643 2.2.2.2:
“The significance of the NTZ is that the monitoring radar controllers must intervene to establish separation between aircraft if any aircraft is observed to penetrate the NTZ.”
2.5.12 What separation form is not mentioned but it would need to be radar separation as this is all that is available.
2.5.13 Pilot response is based in part on the instruction given by the controller as far as heading and altitude (nominally a climbing turn) but also relies on parameter detail for conducting such manoeuvres as decided by the operator and state.
2.5.14 ICAO PANS-ATM Doc 4444 6.7.3.2.10 also states when radar monitoring is complete:
“Radar monitoring shall not be terminated until:
a) visual separation is applied, provided procedures ensure that both radar controllers are advised whenever visual separation is applied;
b) the aircraft has landed, or in the case of a missed approach, is at least 2km (1.0NM) beyond the departure end of the runway and adequate separation with any other traffic has been established.”
2.5.15 Reduction of the criteria specified for independent approaches has been researched and implemented in some states.
2.5.16 The FAA has researched the use of independent approaches with standard (4.8 sec update rate) radars and with runways spaced only 4000ft (1220m) apart. This is done in conjunction with the use of their Final Monitoring Aid (FMA) display tool. This procedure sits below the ICAO centreline spacing minima for such approaches of 4300ft (1310m) and the equipment specification criteria.
2.5.17 The FMA is the display used in the FAA PRM system. This system provides both aural and visual alerts. The visual alerts are delineated between a predicted transgression (blunder) into the NTZ and an actual penetration of the NTZ. Track projection is done by the FMA system.
2.5.18 Although research was done some time ago and no action taken from it at the time, results indicated the feasibility of its use. Now coupled with the enhanced accuracy of RNAV/RNP approaches the subject is being revisited.
2.6. Terrain
2.6.1 Responsibility for terrain clearance with regard to issuing heading instructions for an aircraft on an independent parallel approach is still unclear.
2.6.2 Aircraft proceed below minimum radar terrain or vectoring altitude while controllers monitor the approaches. If instructions, such as headings for separation, are issued by the controller who has the responsibility for terrain?
2.6.3 ICAO PANS-ATM Doc 4444 Chapter 6.7.3.2.1 states:
“c) an obstacle survey and evaluation is completed, as appropriate, for the areas adjacent to the final approach segments.”
2.6.4 ICAO Manual on SOIR Doc 9643 goes further specifying a particular assessment for parallel approaches via Parallel Approach Obstacle Assessment Surfaces (PAOAS). This assessment is carried out for the purpose of safeguarding turns initiated to avoid a potential threat entering the NTZ.
2.6.5 The ICAO Manual on SOIR Doc 9643 also adds that if through such an assessment obstacles are found that would adversely affect a breakout then such obstacles shall be depicted on the radar display.
2.6.6 ICAO PANS-OPS Doc 8168 Vol. II also echoes this under Part III attachment S 3.1. It adds that such assessments are good for turns of up to 45 degrees from the approach path.
2.6.7 This would imply that it is the responsibility of the state to design the procedure so that a breakout instruction can be carried out at any time by the controller down to the minimum of 400ft above threshold elevation and safely allow the flight to achieve the minimum radar vectoring altitude with regards to terrain.
2.7. Conclusions for CSPR
2.7.1 Although ICAO has criteria for the application of simultaneous approaches to parallel runways some States have or are attempting to reduce these further based on research and safety case assessment.
2.7.2 Anecdotal evidence suggests that individual States are creating criteria to accommodate existing runway layouts thus avoid the high costs involved in runway redesign and construction. The results of trials based on such criteria then influences ICAO standards. IFATCA is concerned that other states will use the revised ICAO criteria at a local location without full consideration for its appropriateness at that location.
2.7.3 Risk assessments of an aircraft having to commence a missed approach or break out manoeuvre because of an aircraft on an adjacent approach deviating find the likelihood to be rare.
2.7.4 None of the procedures detailed provide the basic radar separation as required for an approach environment – 3 NM. All appear to be procedures with criteria below 3NM with radar monitoring and controller corrective action cited as mitigation.
2.7.5 Controllers are exposed to the possibility of conducting parallel approaches to runways without the same standard of tools as required by other forms of parallel approaches which have similar aircraft spacing. Examples are dependent approaches with 1.5 NM spacing or independent approaches using standard radar update rates when runways are below 4300ft (1310m) centreline spacing.
2.7.6 Controllers are also exposed to the possibility of operating cumbersome procedures which require in depth knowledge and may have limited application. Runways below 2500ft and reduced criteria based on wake turbulence conditions being an example.
2.7.7 Responsibility for terrain clearance during a breakout procedure appears to rest with the controller. Assurance for the use of such procedures must come through correct application of obstacle assessment by states. Clearer definition of this is required.
2.8. RNAV and RNP
2.8.1 Area Navigation (RNAV) is beginning to have a major impact on approach control. RNAV Transition (T) – routes, approach and departure procedures are finding increased application providing a flexible but very accurate method of flying approaches.
2.8.2 The ICAO Manual on Required Navigation Performance (RNP) Doc 9613 Appendix A defines RNP as:
Required navigation performance (RNP). A statement of the navigation performance necessary for operation within a defined airspace.
2.8.3 For controllers the impact of RNP is highlighted in Doc 9613 Chapter 6.1.1 where:
States have an obligation to define an RNP type of their airspace(s) to ensure that aircraft are navigated to the degree of accuracy required for air traffic control.
This creates for the controller an expectation of aircraft performance based on the airspace/procedure RNP value.
2.8.4 It is important to note that some States, such as U.S.A., vary their definition of RNP by the requirement for an aircraft to have on board conformance monitoring systems (FAA Road Map for Performance-Based Navigation).
2.8.5 Doc 9613 Chapter 4.3.2 identifies the radar monitoring role via the statement below regarding deviation:
“If it is necessary for ATC to intervene, to prevent an aircraft from straying from its cleared route, e.g. due to aircraft system failure, navaid out-of-tolerance conditions or blunder errors, sufficient assistance should be provided to enable the aircraft to regain the route centre line and/or proceed to the next way-point.”
2.8.6 Full RNAV/RNP implementation has the potential to significantly reduce the amount of intervention and control action, such as headings, climb and descents carried out by a controller. Many providers cite the accuracy of the new aircraft systems and the flexibility in procedures that they can create as mitigation for any increased in workload the controller may experience (See Appendix 1). Radar monitoring could increasingly become the predominant skill used by the controller day to day in a full RNAV/RNP airspace and procedure environment.
2.8.7 However to achieve these reductions in workload requires several other factors to be in place:
- A uniform traffic flow with aircraft flying uniform profiles
- Full fleet equipage with the required R-NAV or RNP standard
- In many cases monitoring tools to identify conflict automatically for the controller
2.8.8 In the interim while RNAV and RNP application and compliance is still growing, there is the possibility of additional workload created by the mixed mode operations that will exist. IFATCA has policy on such operations and requires the revision of capacity values to maintain the required level of safety for any technology that introduces mixed mode operations.
2.8.9 Specifically in the approach environment, IFATCA has policy regarding the use of RNP for approach, landing and departure phases of flight. The policy cites the limitation of ATC workload as a significant factor in the determination of RNP procedures.
2.8.10 Looking specifically at RNAV/RNP approach and departure procedures, these are new approach and departure types not just re-writes of the old ground based aid ones. Controllers need to add these procedures to the existing database of approach and departures that lie within the airspace that they have responsibility for.
2.8.11 The number of such approaches can be high due to the variable aircraft equipage that exists and the validity of aircraft type to conduct the approach based on the RNP standard This all increases the controller’s knowledge requirement plus overall workload as pilots advise carrying out, or controllers deduce, various approach types.
2.8.12 Compounding knowledge of the approach/departure types is the complicated profiles that such approaches can contain. A controller who is not familiar with such a procedure due to its infrequent use could be easily distracted when attempting to familiarise themselves with it. Information on such procedures should be readily available and easy to interpret.
2.8.13 Tolerance for out of conformance or pilot error is reduced with such procedures. If an aircraft is observed to be or finds itself out of conformance this may occur quicker and leave the controller with less time to respond in whatever way he or she can.
2.8.14 As mentioned the FAA (U.S.A.) see RNP defined by the requirement for onboard conformance monitoring, The FAA predict that there should be quicker response to deviation times created by onboard systems that are more accurate in detecting deviation than the controller and present the information directly to the pilot. Such systems may alert when the aircraft is out of conformance or no longer RNP compliant for the airspace in which it is operating in.
2.8.15 However, aircraft based systems are not infallible. Although more accurate, errors are still able to enter the RNAV system. The sources used by the RNAV system as the basis for navigation can vary – Flight Management System (FMS), Global Positioning System (GPS), Differential GPS, Inertial Navigation System (INS) or a combination thereof and errors are possible in all.
2.8.16 FMS using VOR/DME referencing is subject to the state of the aid and local affects by terrain etc.
2.8.17 INS can suffer from drift and accelerometer errors (though not with ring laser systems). All can suffer from human input errors at start up.
2.8.18 GPS can suffer from human error and reduced constellation availability. The latter is in many cases predictable and via Receiver Autonomous Integrity Monitoring (RAIM) can be alerted to the pilot and ATC. However, outages can also be sudden in occurrence and notification to pilots of this type of outage is an issue still in development.
2.8.19 Despite the onboard systems if the initial inputs by the pilot or FMS database managers are incorrect pilots may not be alerted.
2.8.20 Additionally, intentional interference of Satellite based navigation systems, such as jamming and frequency interference, by an outside source is also a possibility.
2.8.21 The result for the controller of the errors identified above is that pilots may report and respond to inaccuracy but it is possible that in many cases a controller will be relied upon to detect deviation with monitoring as the primary means of doing so.
2.8.22 RNP also has additional problems that go beyond the cockpit. The rush by States to apply it has created a situation where standards, procedures and approvals vary between States leaving operators and pilots unsure if they are of the required RNP standard for operation within a state. These standards can vary within the course of a single flight. (At one stage up to 11 different standards existed within European airspace).
2.8.23 ICAO is aware of these problems and is seeking to solve them by updating and harmonising RNP procedures under the Performance Based Navigation (PBN) concept. Radar monitoring will inevitably be used to detect aircraft that deviate from RNP procedures/routes when such aircraft are below the stated accuracy required. The lack of uniform application could increase the number of such deviations.
2.8.24 Adding to the task faced by the controller is that subsequently, after deviation has been identified (by pilot, system or controller), many RNAV/RNP approach/departure procedures would leave the controller in a position where if assistance was required with navigation this would be with the flight below radar terrain. How should the controller respond? There are few if any guidelines to what the controller should do.
2.9. RNAV/RNP Approach applications
2.9.1 RNP Parallel Approach with Transition (RPAT) is a variation on SIOA which generally utilises a straight ahead ILS approach and a paralleling RNP approach. The RNP approach is off set from the runway it is designated for and a NTZ is established between the two approach paths. Devised by the FAA, the ILS aircraft is sequenced ahead of the RNP approach aircraft. Vertical separation is relaxed once the aircraft are established and the RNP approach aircraft is required to visually sight the leading ILS traffic before continuing beyond the RPAT missed approach point (Generally 2000’ and 4 NM above/from the threshold). It is envisaged that such approaches can be applied between closely spaced runways between 750 ft and 4299ft centre line spacing.
2.9.2 PRM is not stated as required for such approaches. This is mitigated by the accuracy of the RNP approach and the requirement for onboard conformance monitoring of the RNP aircraft (FAA definition of RNP). Controller workload would be just as high however having to monitor the ILS flying aircraft which has the greater potential to blunder and there is still a possibility of deviation by the RNP flying aircraft due to technical outage or pilot error.
2.9.3 A problem with RPAT approaches is the high minima. States are now looking at parallel RNP approaches to reduce both the runway centre line criteria and the decision minima thus reducing the effect of bad weather.
2.9.4 Such applications would theoretically provide narrower approach spacings than independent approaches to CSPR based on spacing between the centre lines of 4X the RNP value of the approach. For instance for RNP 0.1 this would result in a 2400ft spacing between centre lines.
2.9.5 Controller monitoring would be integral to such a procedure and new automated monitoring tools would be required given the reduced spacing and reaction time available.
2.10. RNAV/RNP En-route applications
2.10.1 In the en-route area RNAV is being applied to allow more flexible (generally aimed at more direct) and closer spaced routing. ICAO provides guidelines for RNAV route spacing within Annex 11 Attachment B.
2.10.2 The minimum protected airspace provided for in RNAV ATS routes is 6 NM either side of the intended track with an expectation of 99.5% containment within the buffer zone by RNAV equipped aircraft for the duration of the flight. This concept is based on RNP 4.
2.10.3 ICAO Air Traffic Services Annex 11 Attachment B goes on to state with regards to practical experience gained in route construction or improvements in aircraft performance:
“In this context, when lateral deviations are being controlled with the aid of radar monitoring, the size of the protected airspace required may be reduced in accordance with the following:

2.10.4 Further to this ICAO Air Traffic Services Annex 11 Attachment B 2.3 states:
“When implementing a spacing encompassing less than 99.5 per cent containment values, radar monitoring is required.”
2.10.5 From the above basis for a protected area, the following route spacings are provided for in a domestic procedural environment. ICAO Air Traffic Services Annex 11 Attachment B 3.4.1:
“18 NM for opposite direction 16.5 NM for same direction”
The above is based on RNP 5 (or RNP4 or better).
2.10.6 Further to this radar, and by association radar monitoring, is used as a vindicator for further reductions down to 10-15 NM using RNP 5 and thence down to 8-12NM when RNP 4 is the standard required.
2.10.7 Beyond this scope further reduction is provided by ICAO documents such as the European Regional Area Navigation (RNAV) guidance material. This document theorises the minimum that RNAV routes may be spaced as 5 NM – that being the same as the separation standard. However, using RNP 1 as an example, as aircraft may be off track by 1 NM or more for up to 5% of the flight time reductions below 7 NM are not expected to be possible without a change in the separation standard.
2.10.8 European Regional Area Navigation (RNAV) guidance material Chapter 3.1.8 again cites radar monitoring as a vindicator for reduction below the procedural standards towards spacing of 15 to 10 NM. Due regard must be given to the overall workload increase caused by such reductions.
2.10.9 ICAO Manual on Required Navigation Performance (RNP) Doc 9613 Chapter 2.5.2 bolsters the need for states to properly asses their infrastructure and capacity before reducing spacing standards:
“The State must ensure that services (i.e. communications, navigation and surveillance (CNS)) within a given airspace provide safe separation for a defined set of separation standards.”
2.10.10 ICAO Doc 9613 Chapter 3.1.8 goes further:
“Before any State makes a decision to establish route spacing and aircraft separation minima, the State must also consider the airspace infra-structure which includes surveillance and communication. In addition, the State must take into account other parameters such as intervention capability,….”
2.10.11 ICAO Air Traffic Services Annex 11 Attachment B, the European Regional Area Navigation (RNAV) guidance material and ICAO Doc 9613 cite trialling by states and ANS providers as the means of achieving such reductions. This gives ANS providers plenty of scope for the testing of and implementation of systems that sit below the ICAO recommendations and, although they are not reductions of separation in themselves, can create an environment where losses of separation will occur more quickly and rely on the controller to identify and resolve them.
2.10.12 Eurocontrol studies regarding the theoretical intervention rates on parallel B-RNAV routes also indicate that the closer the spacing of RNAV routes towards 10 NM the greater the increase of controller interventions. This being mainly brought about by incorrect application of onboard systems (blunders). The study did not include the affect of the incorrect application of TCAS.
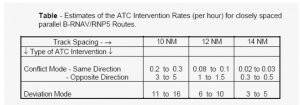
Conflict Mode: Controller action required to stop aircraft being less than 5 NM apart
Deviation mode: Controller action required to stop aircraft entering the 5 NM buffer between routes.
2.10.13 Currently new en-route RNAV based route structures are being developed for several regions. For example, a United Kingdom (UK) application will potentially see distances between closely spaced parallel P-RNAV routes reduced to 5 NM within a 3 NM separation environment. This is based on aircraft navigation accuracy or +/- 1 NM for 95% of the flight. Although some time away this sets a new standard well below the current ICAO guidance material.
2.10.14 As route spacing reduces, the course of action for the controller becomes limited once the deviation is seen. In the case of the proposed 5 NM spacing mentioned, system response would most likely be emergency traffic information and avoiding action. That is if the aircraft involved have not already responded to TCAS and if so is the controller aware of this? Again ICAO Doc 9613 Chapter 3.1.8 requires the State to take into account other parameters such as intervention capability.
2.10.15 As noted before some States see RNP as a solution to some of the problems of RNAV with the requirement of onboard monitoring of conformance. However, development is inconsistent and slow. Additionally fleet equipage is low (USA: 90% RNAV equipage and only 30% RNP) and not helped by the fact many large carriers are dubious of the benefits vs. cost of moving from P-RNAV to RNP level compliant fleets. For example both Lufthansa and BA have fleet wide P RNAV compliance and see RNP upgrading as high cost for little benefit.
2.10.16 Putting aside the differences within RNAV and RNP is the question of aircraft that will still wish to operate without any such equipage. Although this will decrease with time due to cost of implementation there will still be, for the foreseeable future, a great variation in aircraft standards.
2.10.17 Solutions sought by many providers include the establishment of separate routes for those that can not comply and those that can (USA-Q routes), increased separation or delay. However all of these may increase the workload of the controller.
2.10.18 Controllers need to be aware if aircraft are or are not RNAV/RNP equipped or compliant. This adds monitoring aircraft equipment status to the list of controller tasks. Controllers could potentially end up applying varying standards routinely in day to day operations based on equipage or lack there of and variations within the level of equipage.
2.11. Airborne systems
2.11.1 Traffic/Airborne Collision Avoidance Systems (T/ACAS) have been operational for many years now. TCAS provides a safety net for loss of separation situations.
2.11.2 At the moment many ATC systems have no warning to a controller of a pilot response to an Resolution Advisory (RA) beyond the pilot radio call if he or she elects to make one. A controller could have separation already in place and no indication of a breach of separation. Via radar monitoring he or she could commence proactive actions under the assumption that the aircraft is only deviating from its flight plan. Contact made with the pilot could be at least distracting to him or her and possibly delay action required by the controller with regards to any non-mode C equipped aircraft or adjacent ATC sectors that may be affected.
2.11.3 An example of where this potential confusion can arise is independent parallel approaches to CSPR. The proximity of such approaches can mean, in the event of a deviation or blunder into the NTZ, TCAS RA’s could be generated which could provide alternative instruction to the breakout instruction issued by the controller.
2.11.4 Although considered rare, due to the amended parameters TCAS is set to on such approaches, FAA advisory information on SOIA highlights the issue and reiterates the pre-eminence of TCAS information over other instruction. This could include descent instruction when the controller has issued climb instruction for the breakout manoeuvre.
2.11.5 A solution to the above problem is the Mode S transponder and supporting surveillance systems. These have the capacity to relay to the monitoring controller that an aircraft is involved in an RA response. Full effectiveness would only be achieved with a uniform level of aircraft equipage. It is important to note however that currently down linking of ACAS advisories is opposed by IFATCA.
2.11.6 Further variability has been introduced by the inconsistent application of avoidance information by pilots with regards to RAs. Only increasing this variability are recent examples of manoeuvring actions taken by pilots based on misinterpretation of the visual indications presented on the TCAS display despite the controller having sound separation already in place (Eurocontrol ACAS bulletins).
2.11.7 The above examples highlight the need for appropriate TCAS information and clear rules of use. As the controller is currently only linked to the system via pilot notification the monitoring controller is exposed to the variability that can exist. This variability is in conflict with the current IFATCA policy on ACAS which requires safe operation and no detrimental effect to the ATC service or aircraft not fully equipped.
2.11.8 Another onboard development that has potential to affect radar monitoring is Airborne Separation Assistance Systems (ASAS). Research into ASAS is aimed towards placing greater autonomy within the cockpit. Moving responsibility for the maintaining of separation to the cockpit is seen as a way of reducing controller workload. A current “in use” example of this ideology is the delegation of visual separation by controllers to IFR aircraft when conditions are suitable. The evolution of this ideology is to use onboard systems to assist the pilot in acquiring traffic visually or further still to allow for the delegation of a separation from ATC to the pilot or autopilot via the ASAS system.
2.11.9 Applications include Enhanced Visual Acquisition (EVA) for see and avoid and enhanced successive visual approaches. Beyond this trials are being conducted to test the feasibility of system based sequencing, in trail and crossing procedures.
2.11.10 ASAS requires Automatic Depended Surveillance – Broadcast (ADS-B) or similar technology to be used by aircraft to broadcast information including identification, trajectory and even intent information. Such information is displayed onboard on a Cockpit Display of Traffic Information (CDTI) and used by the pilot to assist in sighting traffic and potentially to maintain spacing. Controllers are still crucial to the system for the detection of conflict and the specification and delegation of separation.
2.11.11 From the radar monitoring aspect such operations could have a major affect:
- Controller workload could increase as controllers will need to:
- Detect conflict;
- Verbally identify the separation traffic and verbally specify separation or sequencing criteria to the pilot;
- Monitor the particular separation to insure conformance and system integrity.
However, studies on simulated ASAS sequencing in approach indicate a reduction in altitude and heading instructions based on the delegation of separation to the cockpit. This increases the percentage of work time a controller monitors but may reduce overall workload.
- The monitoring task becomes shared. Separation conformance is delegated to the pilot who will also monitor the requirement. Pilots will potentially take action based on the CDTI information before controller intervention has occurred.
- Over time controllers could become complacent with such systems because of their reliability. This could result in controllers losing overall appreciation of the traffic situation especially with regards to enhanced sequencing applications. A subsequent system failure could see controllers unable to respond correctly.
- While the system is still manual in the selection of conflict by the controller, the passing of information and application by the pilot there is still the chance of error in inputting or misinterpretation along the lines of TCAS information. Monitoring will play a major part in detecting such human error.
- ASAS use of ADS-B could pre-empt the use of ADS-B for ground surveillance. This would have advantages to controllers monitoring ASAS applications through the broadcast of aircraft trajectory and intent information. However it would potentially change the radar monitoring role to a surveillance monitoring one.
2.11.12 Various ASAS applications will take affect over the next 10 – 15 years. Such systems must be able to keep the controller engaged and responsive while not unduly increasing controller workload or overall system safety.
2.12. Monitoring tools
2.12.1 Automation of the monitoring function is becoming more common place as traffic levels increase and route spacings decrease. These computer based aids are the only assistance to the controller at the moment in the provision of a radar monitoring service.
2.12.2 At present there are no guidelines or rules regarding the implementation of monitoring aids and in some cases controllers are being required to work with new procedures with no automated monitoring assistance at all. Alternatively controllers are given tools that are inappropriate for the environment in which they work.
2.12.3 ICAO PANS-ATM Doc 4444 Chapter 3.1.2 highlights support aids in the assessment of capacity values:
“e) availability of ATC systems providing controller support and alert functions;”
2.12.4 ICAO PANS-ATM Doc 4444 goes further in chapter 8 Radar Services:
“8.1.3 Radar systems…..and should provide for an appropriate level of automation with the objectives of improving the accuracy and timeliness of data displayed to the controller and reducing controller workload….
8.1.4 Radar systems should provide for the display of safety related alerts and warnings, including conflict alert, minimum safe altitude warning, conflict prediction and unintentionally duplicated SSR codes.
8.4.1 Where suitable radar systems and communication systems are available, radar- derived information, including safety related alerts and warnings such as conflict alert and minimum safe altitude warning, should be used to the extent possible in the provision of an air traffic control service in order to improve capacity and efficiency as well as to enhance safety.”
2.12.5 Unfortunately 8.4.2, which outlines the factors for consideration when deciding the number of aircraft that can be provided with a radar service, does not specifically highlight monitoring aids.
2.12.6 Further detail is provided in ICAO Air Traffic Service (ATS) Planning Manual Doc 9426 Part 2 Section 3 Chapter 3 which goes into some detail regarding the general considerations when applying automation to air traffic tasks or systems – although it has no specifics regarding automation of the radar monitoring task.
2.12.7 ICAO Manual on Required Navigation Performance (RNP) Doc 9613 Chapter 6.1.5 highlights the possible need for automation when states are considering the introduction of closely spaced tracks:
“ It is possible that closely spaced parallel tracks will be introduced, or routes will be established close to airspace currently reserved for other purposes. In such cases, some form of alert in case of track deviation of conflict may be necessary.”
2.12.8 Decisions on what, if any alerting system are required based on the level of traffic or complexity appear to be left to the ATS provider.
2.12.9 Monitoring tools come in various forms. Conformance monitoring or Route Conformance Monitoring Systems (RCMS) and in some cases level adherence monitoring systems are available on many surveillance systems.
2.12.10 As a basis, many of these alarms work by the ATM system comparing the current aircraft position against the aircraft predicted trajectory (based on flight plan and system database values for the aircraft type or imputed data by the controller such as heading).
2.12.11 The parameters for alarm activation are configurable within such systems. Depending on what they are set to, this can lead to the indication of spurious or false alerts – “crying wolf”
2.12.12 “Crying wolf” is already a problem in many current systems and could be more so in future more accurate systems. For example a proposed UK system would see accuracy of 0.7 NM for deviation alerting. As mentioned, many monitoring tools look to the flight plan for the basis of comparison. These tend to plot from point to point when in reality aircraft will lag or lead slightly in turns over waypoints and in climbs or descents. Highly accurate systems would potentially alert this.
2.12.13 The alternative to this is that such systems are disabled or have greater parameter values in those environments where their normal operation would be seen as distracting. In Australia, for example, in terminal environments their RCMS parameters are set somewhat higher than the en-route parameters – to cater for vectoring. Thus in effect you have turned the system off. This can be a particularly dangerous situation when concurrently providers are introducing R-NAV or RNP route structures which bring route spacings closer together particularly if such routes contain turns on fly over or fly by points.
2.12.14 Introduction of closely spaced route procedures should not be carried out without the provision of adequate automated monitoring tools. It is suggested that such tools consist of a conformance tool based around the type used in independent simultaneous approaches with an ability to predict penetration into an en-route or approach specific protected area and a further tool to alert for actual penetrations of the particular route protected area.
2.12.15 There are several risks associated with the increased use of automated monitoring tools. Current IFATCA policy regarding automation and human factors encompasses the requirements of such systems with regards system integrity, the appropriateness of the information such tools provide, controller engagement and his/her ability to react to abnormal situations.
Conclusions
3.1 In the approach environment radar monitoring is used as a mitigating factor in the reduction of standards below the separation criteria specified for such environments (3NM). Both dependant and Independent approaches to CSPR have ICAO criteria that sit below the 3NM criteria.
3.2 Some States are researching and using procedures that go below the ICAO criteria for dependant and independent approaches to CSPR and are also investigating methods of operating dependant approach procedures below the 2500 ft runway centreline spacing minima.
3.3 Controllers face the possibility of operating such new methods without the necessary support tools or equipment levels required of the ICAO standards.
3.4 Anecdotal evidence suggests that individual States are creating criteria to accommodate existing runway layouts thus avoid the high costs involved in runway redesign and construction. The results of trials based on such criteria then influences ICAO standards. IFATCA is concerned that other states will use the revised ICAO criteria at a local location without full consideration for its appropriateness at that location.
3.5 Terrain clearance responsibility is still unclear for situations involving aircraft deviation below the minimum radar vectoring altitude which require controller intervention and instruction. ICAO documents provide States with guidelines for the of assessing of obstacles within final approach segments to ensure the safety of any breakout manoeuvres but it would appear the responsibility for terrain separation still lies with the controller once an aircraft is given instruction in such situations.
3.6 RNAV and RNP will have a major impact on both the en-route and approach environments. Full RNAV/RNP implementation has the potential to significantly reduce the amount of intervention and control action carried out by a controller. Radar monitoring could increasingly become the predominant skill used by the controller day to day in a full RNAV/RNP airspace and procedure environment.
3.7 Mixed mode operations that will result from the transition to a full RNAV/RNP environment could unduly increase the workload of the controller and potentially affect safety levels. IFATCA is apposed to the implementation of technology that has these effects. RNAV/RNP approach and departure procedures need to be streamlined to avoid encroaching on the controller’s ability to use them effectively. Such procedures should be readily available and easy to interpret.
3.8 Some States define RNP by the requirement for onboard conformance monitoring. This appears to differ from the ICAO definition.
3.9 RNAV/RNP navigation systems can suffer from error. Controller monitoring will still be an integral part of an RNAV/RNP environment. Additionally application of RNAV/RNP standards is inconsistent.
3.10 At present there has not been a reduction in en-route separation standards. Reductions in route spacing, particularly parallel route spacing have occurred. Radar monitoring is used as a mitigation for such reductions.
3.11 T/ACAS application can have a major effect on the controller’s ability to monitor effectively. Inability to relay RA response or misinterpretation of cockpit information by the pilot can leave the controller responding inappropriately based on the information they have to monitor by. IFATCA policy on ACAS requires safe operation and no detrimental effect to the ATC service or aircraft not fully equipped. Appropriate information and clear rules of use are required of such systems.
3.12 ASAS systems have the potential to affect the monitoring role of the controller over the next 10 – 15 years. Such systems could see the sharing of the monitoring role between the controller and the cockpit.
3.13 ASAS technology has both the ability to increase or decrease the controller’s workload depending on the effectiveness of its application. Human factor issues will also play a major part in its use.
3.14 Automated monitoring tools are increasingly being used particularly where route spacing is being reduced.
3.15 Monitoring tools are not infallible. They can become ineffective if they over alert and useless if their parameters are set to wide for the environment they are used in.
3.16 There are no specific ICAO guidelines for the implementation of monitoring tools. States are given the responsibility to decide when and what monitoring tools should be used.
3.17 With regards to closely spaced parallel routes, ICAO highlights the possible need for them. Considering 3.16 above and because of the reduced spacing and reaction time available to the controller introduction of closely space parallel route structures should not be carried out without the provision of adequate monitoring tools.
Recommendations
It is recommended that;
4.1. This paper is accepted as Information Material.
References
ICAO PANS-ATM Doc 4444.
ICAO Air Traffic Services Annex 11. Attachment B.
ICAO Manual on Required Navigation Performance (RNP) Doc 9613.
ICAO ATS Procedures Volume 2.
ICAO Manual on Simultaneous Operations on parallel or near-parallel Instrument Runways (SOIR) Doc 9643.
ICAO PANS OPS Doc 8168, Volume 2.
ICAO European Region Area Navigation (RNAV) Guidance Material.
ICAO Journal Volume 61.
IFALPA PANS-ATM.
FAA web site.
EUROCONTROL web site.
NEAN update program web site.
ICAO web site.
A Phased approach to increase airport capacity through the safe reduction of existing wake turbulence constraints. By Steve Lang, FAA/The MITRE Corporation.
Issues in airborne systems for closely spaced parallel runway operations. Department of Aeronautics and Astronautics MIT.
Air Services Australia web site.
Space Communication and Aviation Navigation: The United States Moves towards Performance-Based Navigation. By Hank Cabler and Jeff Williams.
Tunnels in the Sky. By Anne Paylor, Air Transport World.
Applications and benefits of RNP approaches in the United States National Airspace System. Various Authors The MITRE Corporation.
Analyzing conformance monitoring in air traffic control using fault detection approaches and operational data. By T G Reynolds and R J Hansman.
Improving flight efficiency through terminal area R-NAV. By various authors. The MITRE Corporation.
Air Traffic Issues Related to RNAV Implementation. Thomas Meyer and Bruce Tarbert, FAA.
Human Factors in air traffic control. By M Smolensky and E Stein.
EUROCONTROL ACAS Bulletin No. 7.
EUROCONTROL ACAS Bulletin No. 8.
Air traffic concepts utilizing 4D trajectories and airborne separation assistance. American Institute of Aeronautics and Astronautics.
Communications, navigation, Surveillance and Avionics within a 2020 future vision. Robert Morgenstern. The MITRE Corporation.
Appendix 1 – Factors affecting reduced controller workload by way of the application of RNAV/RNP procedures
EUROCONTROL studies have shown that there are benefits to the controller current workload in several areas with the application of RNAV and RNP. These include:
- Reduced Radio telephony (RT) and read back errors.
- Reduced vectoring and associated flight errors. The errors are reduced by the aircraft FMS which factors in winds which can not be as accurately assessed in applying vectors. Reduced vectoring has particular application in the terminal enviroNMent with the use of RNAV SIDs and approach procedures.
- Reduced restriction on departures. If operated in an enviroNMent when arrivals can practice programmed decent profiles, such as Advanced Continuous Descent Approaches (ACDA), the later top of descent and steeper profile creates extra vertical spacing for a departure to climb.
- Reduced flight time and tracking. Again particular to the terminal enviroNMent. This is based on aircraft flying programmed descent profiles on RNAV STARs. The higher speed maintained by the aircraft and reduction in intervention equating to reduced workload.
- More predictability in aircraft tacking.
Hartsfield-Jackson Atlanta International Airport RNAV Standard Instrument Departures

