
DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
51ST ANNUAL CONFERENCE, Kathmandu, Nepal, 12-16 March 2012WP No. 88Study Merging and Sequencing ConceptsPresented by TOC |
Summary
Due to environmental, economical and operational reasons the need for more accurate merging and sequencing tools has arisen. This working paper will try to explain the concepts of some of the systems, which are being developed for the use in future ATM. This paper will propose IFATCA Policy on Merging and Sequencing Concepts.
Introduction
1.1 To meet future demands of the airspace users such as increase of air traffic, increased cost effectiveness and environmental issues, the global aviation community realised that future ATM needed to be “Performance Based ATM” (P-ATM).
1.2 To increase the performance of the ATM system for inbounds streams, merging and sequencing concepts are being developed at different places around the world.
1.3 At the 50th Annual Conference in Amman, TOC was tasked to investigate these merging and sequencing concepts. This papers presents the outcome of this study.
Discussion
2.1 What is Performance Based ATM?
2.1.1 P-ATM integrates advanced capabilities that should provide vastly improved surveillance, navigation, data communications, and automation for ground and airborne systems with changes in service provider roles and responsibilities.
2.1.2 In other words it is a concept, which must increase operational productivity while maintaining a human-centric operation with, use of automation capabilities (NextGen).
2.1.3 Under the P-ATM concept, many routine air traffic control tasks will likely be automated. A network of highly precise RNAV/RNP routes will be designed to increase flexibility, efficiency and capacity. The flight deck automation would enable aircraft to fly these routes and altitude profiles precisely while exchanging flight status and intent information with the ground systems.
2.1.4 Along with that, the merging and sequencing systems are to be evolved to provide powerful tools to allow controllers to handle the increased amount of traffic.
2.1.5 In en-route operations, responsibility for problem prediction would migrate from controllers to ground automation, and controllers would solve problems using automated resolution assistance. The integration of advanced automation with air/ground data communications would assist the controllers in accommodating pilot requests and providing more efficient manoeuvres when resolving predicted conflicts.
2.1.6 The P-ATM concept should provide better management of uncertainty with capabilities that support enhanced decision-making over a longer time-horizon and efficient execution of flight- specific interventions.
2.1.7 The reduction in execution time, along with improved tools for defining and monitoring the interventions, would allow for better traffic flow planning and provide the opportunity to implement initiatives incrementally and only when necessary.
2.1.8 Terms like Trajectory Based Operations, Performance based Operation, 4D trajectories, Continuous Descent Arrivals, Airborne Separation Assistance Systems, Controlled Time of Arrival and many other are circling around the aviation community these days.
2.2 What do they stand for?
2.2.1 Trajectory based operations – should enable aircraft to fly negotiated flight paths necessary for full performance based navigation, taking both operator preferences and optimal airspace system performance into consideration.
2.2.2 Performance based operation – uses the inherent capability of the aircraft to operate close to the optimum trajectory, taking into account constraints such as airspace use.
2.2.3 4D trajectories – The precise description of the flight path of an aircraft as a 4 dimensional continuum from its current position to the point at which it shuts down at its destination. (in theory every point on a 4D Trajectory would be precisely associated with a time over)
2.2.4 Continuous Descent arrival – a flight procedure where the vertical profile of an arrival has been optimized so that it can be flown with engines at “flight idle” from a high altitude (potentially from top of descent) until at least the final approach fix.
2.2.5 Airborne separation assistance system (ASAS) – provide information to the cockpit about the position of surrounding traffic. In the future this may enable some separation tasks to be delegated from the air traffic controller to the flight crew.
2.2.6 Controlled Time of Arrival (CTA) – An ATM imposed time constraint on a defined merging point associated to an arrival runway which the aircraft respects only by thrust/speed adjustments. This is only possible after a system based negotiation process, where the aircraft downlinks estimated min and max times over, ATM then choosing a time within that window. If required time is outside that window, CTA is no longer an option. The concept of CTA is discussed in agenda item B.5.2, Study the Concept of Controlled Time of Arrival.
2.2.7 Controlled Time Over (CTO) – An ATM imposed time constraint over a point.
2.3 IFATCA policy
2.3.1 At the moment there is no policy on sequencing and merging as such. The policy on Controller tools could be a good basis for development of one.
2.3.2 IFATCA policy on Controller tools is:
| “Controller Tools (CTs) are functions of an ATM system that enhance a controller’s ability to meet the objectives of ATS. They provide information that assists controllers in the planning and execution of their duties, rather than dictating a course of action.” |
2.4 ICAO
2.4.1 In Doc.9931, Chapter 1. Continuous descent operations, part 1.2, there are some guidelines on CDO design options describing some sequencing methods:
1.2.1.5.3 Sequencing Methods. Except in very low traffic density situations, some type of sequencing is usually required in order to maintain optimum landing rate. The following three sequencing methods can be applied to both types of CDO:
a) Automated sequencing methods – use of automated sequencing systems such as required time of arrival (RTA), traffic management advisory (TMA) displays and relative position indicators (RPI). Such systems provide for efficient planning adjustments to be made to aircraft trajectory prior to beginning a CDO procedure. Automated sequencing methods are rapidly evolving and will increasingly play an important role.
b) Speed – Speed control is most effective when a small correction is made early in a procedure and given time to take effect, or, when speeds are a part of the procedure. Speed control allows for predictable performance and is made to establish and maintain separation, and insure consistent performance between different aircraft. Small speed adjustments can allow the aircraft to stay on a pre-defined closed path. Large speed adjustments may be counterproductive when following aircraft also need to be slowed to match and will require the aircraft to depart from efficient aircraft flight configurations.
c) Vectoring – Vectoring is the most flexible way to sequence arriving traffic and maintain capacity. It is also the most frequently used method. Vectoring, however, provides the least advanced predictability to pilots with respect to flight path distances, and may require pilots to respond to a situation rather than to plan ahead. Providing the pilot with information on estimated distance-to-go can help to mitigate uncertainty. Aircraft may be on a planned open path vectoring procedure or may be vectored off a closed path procedure in order to establish or maintain sequencing and spacing. In closed path CDO small speed adjustments should be considered first, preferably before the aircraft is vectored off the procedure. Remaining on the procedure will allow the FMS to maintain distance calculations.
1.2.1.5.4 Path stretching method/design
1.2.1.5.4.1 Path stretching method/design is a planned vectoring path that has predetermined waypoints known to the FMS, pilot, and ATC. The procedure can be issued to increase separation while allowing the FMS to fly the aircraft on the CDO. Path stretching may be used in addition to speed control methods.
1.2.1.5.4.2 Merge point – With this technique, aircraft follow an RNAV routing, which generally includes a level flight arc segment until receiving a ̳direct to‘ routing to a merge point. The pilot may execute a CDO prior to the merge point arc, maintain level flight whilst following the arc and continue with CDO when cleared to the merge point. When traffic levels permit, the aircraft would be cleared direct to the merge point rather than establishing on the arc. See Figure 1-5 below.
2.4.2 In Doc.9931, Chapter 1. Continuous descent operations manual, part 2.3, there are some guidelines on ATC techniques:
2.3.5.2 Sequencing techniques in relation to CDO and optimal AAR
2.3.5.2.1 The application of CDO procedures in the air traffic system, including their impact on aircraft sequencing and landing rates, depends on the level of traffic density and types of flights involved. Application of the procedures could vary during hours of operation. From strictly an environmental standpoint, application of CDO procedures can be beneficial regardless of airport size. Except for very complex airspaces it should be possible to enable some degree of CDO to most airports.
2.3.5.2.2 While the use of a CDO will usually be seen as an environmental benefit whatever the size of the airport, the operational consequences should be considered for any application.
2.3.5.2.3 In collaboration with other operational stakeholders, ATC should be able to implement the best mix of facilitation techniques so as to suit present and future traffic scenarios. Where feasible, CDO using pre-planned profiles should be available from as high levels as possible, using the full capability of airborne and ground-based systems. When traffic levels or operational requirements dictate otherwise, a reversion to vector-based CDO procedures or non-CDO procedures may be necessary.
2.3.5.2.4 ATC units should through collaboration make use of tactical opportunities to offer CDO from top of descent; and seek to optimize the number of and extent of CDO over time.
2.4.3 In Doc.4444, Chapter 6. Separation in the Vicinity of Aerodromes, there are some guidelines on sequencing and spacing of instrument approaches:
6.5.6.2 SEQUENCING AND SPACING OF INSTRUMENT APPROACHES
6.5.6.2.1 TIMED APPROACH PROCEDURES
6.5.6.2.1.1 Subject to approval by the appropriate ATS authority, the following procedure should be utilized as necessary to expedite the approaches of a number of arriving aircraft:
a) a suitable point on the approach path, which shall be capable of being accurately determined by the pilot, shall be specified, to serve as a checkpoint in timing successive approaches;
b) aircraft shall be given a time at which to pass the specified point inbound, which time shall be determined with the aim of achieving the desired interval between successive landings on the runway while respecting the applicable separation minima at all times, including the period of runway occupancy.
6.5.6.2.1.2 The time at which aircraft should pass the specified point shall be determined by the unit providing approach control service and notified to the aircraft sufficiently in advance to permit the pilot to arrange the flight path accordingly.
6.5.6.2.1.3 Each aircraft in the approach sequence shall be cleared to pass the specified point inbound at the previously notified time, or any revision thereof, after the preceding aircraft has reported passing the point inbound.
2.4.4 There are a few major modes of operation being developed for the purpose of handling the traffic en-route and in terminal areas.
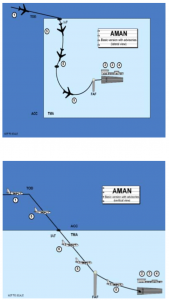
2.5 Arrival Management Systems (AMAN)
2.5.1 Arrival Management systems (AMANs) have been developed in Europe over the course of many years. Without a centralized or standardized approach, these systems, including their related procedures and methods of implementation, have developed somewhat independently. As such, these systems are now used in slightly different ways in different locations.
2.5.2 In some areas AMANs are used and regarded as essential sequencing aids, providing robust support for the ATCOs sequencing traffic to an airport. In other locations they are used primarily as “metering” tools, mainly used for regulating the flow of traffic into the TMAs surrounding busy airports. In yet other implementations they fulfil a traffic awareness role, or are used for coordination purposes. In some areas, they occupy only a background role for most of the time, working but not really “used”.
2.5.3 Definition
2.5.3.1 In aviation terms, “Arrival Management” is a general term given to the process of safely and effectively arranging arrivals into a smooth efficient flow for landing at a destination airport.
2.5.3.2 Different elements of the ATM system can impact on arrival management and vice versa, arrival management can also impact on, and place requirements on, other elements of the system. Airspace design and route structure, software available or being used are all important elements to be considered in the overall context of arrival management.
2.5.3.3 To assist in the arrival management process, several aids and support are already available and being used. These can range from simple pieces of paper (such as flight-schedule printouts, or flight-progress strips arranged in sequence on a flight-progress board), to electronic aids, where simple arrival information (such as ETA) is presented to those ATCOs handling the flight.
2.5.3.4 At the top of the range sits dedicated software functionality, which not only assists in sequencing and optimising the flow of arriving flights, but also provides information (or advisories) to the ATCOs on what is needed to create and maintain the arrival sequence.
2.5.3.5 When people consider or talk about dedicated Arrival Management software, or AMANs, they are usually considering this type of software specifically designed to provide assistance in metering and sequencing arrival streams of traffic and which gives, via electronic display, all the time management, and other information needed to implement efficient arrival management.
2.5.4 General concept
2.5.4.1 The general objective of an Arrival Manager (AMAN) is to provide electronic assistance in the management of the flow of arriving traffic in a particular airspace, to particular points, such as runway thresholds or metering points.
2.5.4.2 The AMAN itself is usually managed by a dedicated controller (such as, a “Supervisor” or “Manager” in Approach) and the computed information can be distributed in Approach Sectors, TWRs and also upstream to ACC sectors and other centres.
2.5.4.3 The planning and/or sequencing function of the AMAN also aims to reduce controller workload, particularly in case of perturbations (such as runway closure).
2.5.4.4 To be able to achieve this, the system should be designed in a way to allow the controller to manually intervene in case such an adjustment would provide a better solution i.e. when a/c could be given more direct routing to IAF to enable the succeeding a/c to be cleared to IAF earlier.
2.5.5 Inputs to AMAN
2.5.5.1 Main input sources, an Arrival Manager uses are:
- The flight plan data retrieved from a Flight Data Processing System (FDPS);
- Radar data from a Radar Data Processing System (RDPS), which is then correlated to flight plan data.
2.5.5.2 The system utilises an aircraft performance model and it is also fed with known airspace/flight constraints, such as speed restrictions (e.g. 250kts below FL100) to be used in the calculation of predicted times and aircraft trajectories. Wake Turbulence Category information is also taken into consideration.
2.5.5.3 Weather information (wind) is also usually made available to the AMAN, to assist in more accurate flight prediction.
2.5.5.4 Manual inputs to the AMAN include insertion of the landing rate or separation on final and/or the cadence of landing for a runway, or “slots” to block a runway for a specified length of time.
Basic process:
- Around 150-200nm from touchdown, the aircraft is captured. This distance is often called the AMAN horizon.
- On the ground, the AMAN system computes the aircraft’s preferred Arrival Time.
- The flight is then sequenced in the flow of traffic, in function of its computed preferred Arrival Time and sequencing criteria.
- The AMAN system displays notifications and advisories to the ATCO, who uses them to sequence the aircraft (via R/T).
- The aircraft follows the instructions given by the ATCO.
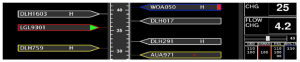
2.5.6 Output of AMAN
2.5.6.1 An optimised sequence, a time-line, time- information and delay management advisories are all usually provided on a screen for the AMAN supervisor.
2.5.6.2 These advisories can include:
- Time to Lose (TTL), or
- Time to Gain (TTG),
- Speed advisories or turn advisories.
2.5.6.3 The AMAN display (as used by the AMAN “supervisor”), or the output of the AMAN in a simpler version (perhaps just the action required, such as TTL/G), may also be distributed to other sectors/ACCs or airports for sequence awareness, delay actions and co-ordination purposes.

2.5.6.4 AMAN information can be an integral part for the actors/partners involved in the CDM Process i.e. Airport can use the info from AMAN in calculation boarding times etc.
2.5.6.5 Generally an AMAN supervisor manages the AMAN. He/she sets and adjusts landing rates, handles runway closures/switches and also other perturbations (go-around, aircraft proceeding to diversion airport during the approach…). The AMAN manager is usually responsible for changes to the sequence, swapping 2 or more aircraft as needed. He/she is also generally responsible for manually reserving slots for pop-up traffic, traffic originating within the AMAN horizon.
2.5.6.6 Although the AMAN supervisor is usually responsible for interacting with/monitoring the progress of the flights in the AMAN, it is the sector ATCO who remains in charge and who is responsible for the tactical application of any delay, and for the overall control/safety of the flights concerned.
2.5.6.7 The use of the AMAN varies somewhat from ACC/APP to ACC/APP, and its acceptance and use by controllers also varies from ATCU (Air Traffic Control Unit) to ATCU. In some cases the AMAN is left operating relatively passively in the background, whilst in other areas the AMAN has become such an integrated part of the daily routine that its unavailability can lead to reduced acceptance rates.
2.5.7 Types of AMANs
2.5.7.1 It is a complex task to define/classify all of the different types/levels of automation used in arrival management. Individual interpretations of what constitutes “arrival management functionality” are widespread.
2.5.7.2 From the study performed in the “AMAN Status Review – 2009” by Eurocontrol, it seems that “Arrival Management” support can be divided into 3 main categories:
- A simple “non-dedicated” arrival management category (basic FDPS functionalities)
- Today’s current “dedicated AMAN” (A-AMAN)
- Tomorrow’s (developing) “dedicated AMAN” (4D Planner/DFS)
The DFS product 4D Planner is the first operational second-generation arrival manager. It maximises the use of the limited resources of airspace and runway throughput, thereby achieving maximum flexibility and a lower workload for the controller. The 4D Planner operates in four dimensions; apart from the normal dimensions of horizontal position x-y and altitude z, the fourth dimension “time” is integrated into all calculations. This fourth dimension improves the accuracy of the arrival management system while maintaining the high safety level. Using all relevant data, the system generates an overall plan for all approaches, derives the appropriate management information from this plan and displays this information to the controller. The 4D Planner continuously compares the planned with the real traffic situation in order to update the optimum approach sequence. The controller is thus able to precisely control approaching air traffic with respect to the timing and adjust the separation distances at the runway threshold for optimum efficiency. The system considerably reduces the effects of interfering factors on the separation accuracy. This applies to both external factors, such as wind, and inaccuracies resulting from human shortcomings on the ground and in the air. The new planning system also ensures more precise compliance with the times over metering fixes and the runway threshold.
2.5.8 AMAN can result in the following benefits:
- Better planning of arrival flows
- Reduced controller workload
- Improved vertical flight profiles – CDA
- Enhanced runway throughput
2.5.9 What is a current AMAN and what is it not?

2.6 Speed And Route Advisory (SARA) project
2.6.1 Air Traffic Control the Netherlands (LVNL) together with partners (KDC, Boeing, Eurocontrol, MUAC, Transavia, and NLR) has started the SARA project at Schiphol Airport, Amsterdam.
2.6.2 One of the biggest problems in busy TMAs is the unpredictability and instability of the arriving stream of aircraft. Numerous conflicts require constant involvement of air traffic controllers providing heading instructions, occupying frequency, resulting in increased workload for controllers and aircrews and often inefficient trajectories.
2.6.3 The objective of SARA is to give advice on speed and/or routing, derived from AMAN, to (Upper) Area Controllers in order to achieve the planned arrival time(s) of the aircraft over fixes (and implicitly via the Inbound Planning (IBP) function over the runway threshold). Stream of traffic at IAF should be smooth, reliable and accurate to allow the use of fixed arrival routes in TMA with the aim of reducing controller’s workload and better predictability for controllers as well as operators.
2.6.4 The mission of SARA project is to develop a concept of operation built on ideas of tailored arrivals (routes with vertical guidance created on the fly by automation) which should be suitable for operation in the Amsterdam FIR.
2.6.5 SARA will reduce the number of tactical clearances (and thus the R/T load), because of its ability to generate a single, comprehensive, solution for meeting the time at the IAF. At a later stage SARA could progress to providing conflict free solutions.
2.6.6 The project should describe highly efficient aircraft descent in high density airspace and should enable aircraft to fly over fixes, such as IAF with high accuracy without increasing controller’s workload. Higher accuracy should allow use of fixed route structures in TMA.
2.6.7 SARA should allow pilots to use FMS automation to fly an optimized descent, decreasing fuel burn resulting in fewer emissions.
2.6.8 It is expected that with use of SARA there will be:
- Fewer interventions between controller and pilot,
- Clearances issued before top-of-descent,
- Less fuel emissions, and
- Predictability will increase for all involved.
2.6.9 SARA is being developed as an Area Control tool. It will start working with aircraft before TOD which will enable continuous descent arrival supported by aircraft FMS automation. It will calculate the speed and route that will bring the aircraft at IAF according to planned time the accuracy of which should be high enough to allow use of fixed route in TMA.
2.6.10 The SARA tool relies on several functions in the ATM system: Inbound Traffic Planner (or AMAN), Surveillance Data, and a Trajectory Predictor (TP). The performance of these support functions determines the performance of SARA.
2.6.11 With use of SARA controllers should be able to deliver the aircraft over IAF inside +/- 30 seconds of the Expected Approach Time over the IAF. Today’s margin is +/- 2 minutes.
2.6.12 The principles
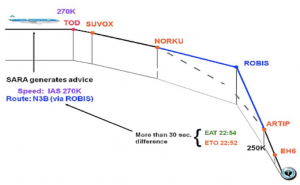
Dark line is representing the basic descent trajectory with significant points along it. For each point there are altitude constrains given. In light grey the ground track of trajectory is shown.
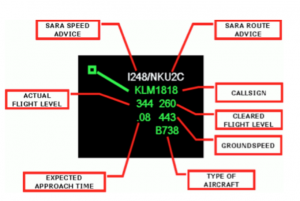
2.6.13 The ground speed of aircraft will determine the exact time at which the aircraft will cross the point. If it is behind the schedule, its speed can be increased and vice versa.
2.6.14 The advice will be presented to the controller via the track label. Other options for HMI could be developed to meet local requirements.
2.6.15 If the deviation from the plan is so big that it can’t be resolved with speed adjustment, the route could be shortened or stretched.
2.6.16 SARA function is designed to use these basic facts to calculate the most suitable speed and route option for each flight quickly and accurately.
2.6.17 SARA concepts
2.6.18 The controller remains fully responsible for separating the traffic. SARA only calculates speed (concept 1) or speed and route combination (concept 2) to execute the planning in the most optimal way.
2.6.19 However, SARA does not provide conflict free solutions with both concept 1 and 2. This implies that controllers must deviate from advisories when they evoke conflicts. In future developments of SARA or other time-based operations, a conflict detection and resolution step could be added to the process.
- Concept 1 – Speed controlIn this concept only speed advice is used. Aircraft fly on standard routes. SARA calculated speed aircraft should fly along standard route in order to arrive over the fix at the time planned. This is time based operation using the standard routes.
- Concept 2 – Use of sequencing legsSimilar to concept 1, but it uses multiple route options. Those routes are in the aircraft FMS data base. This will give SARA longer span of control, since it can use different routes to increase or decrease the length of trajectory flown.
- Concept 3 – Tailored arrivalsIs more advanced than the previous ones. It uses dynamic routes to tailor the arrival to optimally fit the circumstances. The routes are probed for conflicts so that all advice is conflict-free. Data link is used for exchange of information between controller and pilot. The role of air traffic controller in this concept is significantly different from today’s operation.
2.6.20 Real-time simulations were conducted in 2010. The following results were reported:
- Accuracy at IAF increased significantly.
- No increase in controller workload has been noticed, but as stated in ATM research on human factors in SESAR, more long-term planning could mean that certain responsibilities will move from the radar controller to the planner or even to the pilot in managing traffic flows in radar control.
- Situational awareness was lower but acceptable. Controllers might loose their feeling of control when their work moves too much towards supervisory control. They might experience difficulties with trusting the system when solutions are conflicting with their own plan and their SA might be (adversely) undermined. In other words, they cannot use their own strategies for traffic handling anymore.
- Less work with RT and system inputs is replaced with mental task to develop greater situational awareness.
2.6.21 Results of the final SARA validation activities are due to be presented at the industry conference ATC Global in 2012 in Amsterdam.
2.7 Point merge concept
2.7.1 Today common practice is to use open loop radar vectors to merge the traffic flow to the final approach fix. The method itself is efficient and flexible, but it is highly demanding for both air and ground actors, especially in high traffic load conditions. It is also very resilient and small errors can have potentially huge impacts. It imposes rapid decision-making on the controller and requires time-critical execution by the flight crew. Typical consequences are peaks of workload, high frequency occupancy, difficult monitoring of various different a/c positions on radar scope, inefficient delay absorption during less than ideal phases of flight, difficulty to optimise vertical profiles and to contain the dispersion of trajectories.
2.7.2 The concept was initially developed for arrival sectors having a spacing constraint at a given point (e.g. 8NM at IAF). New sets of instructions were successfully developed for sequencing the arrival flows of aircraft. With these instructions, the controller has the ability to achieve and maintain a given spacing along predefined routes with respect to preceding aircraft. Two of these instructions were used to merge aircraft flows at a point and then to maintain the spacing.

2.7.3 Due to absence of routes and merging points in terminal areas the model itself could not be used exactly the way it was developed. A specific precision area navigation (P-RNAV) route structure needed to be developed which consisted of a merge point and segments tangent to a circle centered on this point, creating “sequencing legs”, along with the possibility of sending aircraft direct to this point at any time. Legs are separated by prescribed minimum distance of 1000 feet.
2.7.4 At the same time that kind of route structure is supposed to enable continuous descent approaches (CDAs) even under high traffic load.

2.7.5 The aim is to achieve a desired (prescribed) separation on a point, which could be maintained throughout the approach and landing, with use of predefined legs to this point at iso-distance to this point for path shortening or path stretching which allows expediting or delaying aircraft while staying on lateral navigation mode.
2.7.6 Other than P-RNAV capabilities, no specific airborne functions or ground tools are required. Point merge is also currently regarded as a building block for 4-D trajectory management in SESAR.
2.7.7 An AMAN system could be used, when needed, to implement time constraints prior to the sequence leg entry point or at an appropriate metering point while flights are still in En Route or in Extended-TMA, thereby metering traffic into the Point Merge area of operation and minimising the use of the sequencing leg.
2.7.8 The simulations conducted by Eurocontrol together with ANSPs from Norway, Ireland and Italy, in which operational controllers were also involved, found this working method to be comfortable, safe, accurate and easy to learn and apply.
2.7.9 In a very short time they became familiar with the concept and were able to apply it properly and effectively, even under high traffic load and even in case of extraordinary events. They considered the new technique suitable for, and easy to accept, perceiving it as an evolution of the current controlling method based on radar vectoring.
2.7.10 Possible drawbacks observed were loss of flexibility with respect to the current open loop vectors technique, conditioned applicability in some circumstances like bad weather, concurrent use of point merge and radar vectors in case off traffic not 100% P-RNAV equipped,possible impact on controllers workload in extended TMAs, pure fuel efficiency, longer flown tracks, etc.
2.7.11 In April 2011 they have implemented it at Oslo being the 1st airport in the world.

From an operational point, implementation was largely painless during the initial stages. As controllers’ experience was gained and ATFM measures were lifted, it became clear that efficiency in staffing promised due to flexible sectorization did not materialize.
As long as staffing was available to keep all four radar sectors plus the TMA planner open, the system worked as promised. Due to insufficient staff however, bandboxing of sectors did reveal that although the system can accept very high traffic loads with all sectors open, bandboxing of Director and Final cannot sustain as high a traffic load while still delivering efficient final spacing, as expected prior to implementation. ATFM monitoring values had to be revised.
Oslo ATC acknowledges that staffing is far too low for the new system, and that the planned influx of controllers and trainees is essential in coming years to sustain operations.
The down to basics use of the PMS fans themselves have shown to work very well. The fact that the STARS (which the PMS fans are a part of) have level restrictions prior to entry means that even if R/T gets overloaded, safety is not compromised, and there is ample time to sort the situation out.
It becomes evident that the PMS system has put greater demand on the quality and accuracy of the ACC feeder sectors. Since traffic is in level flight, and locked at 3 flight levels in each “fan”, the spacing between flights entering the PMS system on the same STAR is critical.
Another major factor for the success of the PMS system is a functioning arrival manager. Oslo implemented an AMAN system already in the old airspace system to gain experience with its operation. Correctly adjusting the AMAN system according to intended and actual delivered final spacing and wind conditions is important to prevent overloading the PMS system with traffic. (I.e. preventing “running out of” sequencing legs)
AMAN calculates if all flights would turn at the first point on the sequencing legs, and any inaccuracy in the AMAN adherence at the feeder sectors could be absorbed in the PMS system. In case of AMAN failure, contingency procedures are put in place using rather strict timing tables for each feeder sector.
When implementing PMS, one has to have procedures to deal with non-PRNAV flights (Or ban them from the airspace if desirable/possible). In simulations, Avinor did not sufficiently take the amount of traffic that cannot use the P-RNAV STARs into account. However, from simulations it was known that the best way to deal with such flights, was to direct them to RNAV fixes or radar vector them as closely as possible to the STARS, to keep them in the general traffic flow. The vectoring does increase the workload, not so much due to lateral navigation, but because level restrictions put on STARS to de-conflict with departures and transits have to be given “manually” and monitored much more closely.
P-RNAV compliance is one important factor in PMS. Speed is another. In the Oslo PMS setup 220kts is used in the PMS system. Traffic that cannot keep 220, i.e. slow prop a/c, cannot use the system. They get vectored in, and typically forced down early, and kept below traffic in the PMS system, and put on a low “radar downwind”. The trick is then to decide when to create one extra gap in the traffic turning from the PMS fans to accommodate the flight. Thankfully such slow movers are few and far between at Gardermoen, and are only a concern if they become a significant part of the traffic.
Airlines have complained that fuel savings promised from the project organisation has not been as promised. One of the airlines major concerns about PMS is that since it is designed as a STAR, the entire, theoretical maximum length of the STAR has to be calculated into fuel, even when traffic rarely uses more than one third of the legs, and often much less. This in turn increases fuel burn due to carriage of the fuel itself en-route. Work is on-going to see if the CAA will accept a scheme where the PMS sequencing legs are defined as holding, not STAR, fuel calculation wise. The problem with this is that each airline has to do this work with its respective regulator, which is impractical.
Generally the experience so far with the PMS system has been positive. Given the reduction in radar vectoring, it frees up controller capacity, and reduces R/T loading. However, it is clear that PMS is not practical for all environments, and is clearly more suited for airspace/airports with high and fairly constant traffic loads. Oslo Gardermoen is currently at the low end of the spectrum of airports we think will find PMS beneficial. For medium/low density airspace traditional/conventional P-RNAV STAR systems are probably more suited, as is allows for more flexible descent profiles. Likewise, airspace with a high degree of Non-PRNAV traffic and traffic with speed profiles incompatible with PMS might be better suited with other solutions.
Oslo video: https://www.youtube.com/watch?v=HmCd346cPYk&feature=related
2.7.12 Implementation of Point merge is planned also for airports in Paris, Dublin and Rome.
Conclusions
3.1 AMAN systems can provide an optimised sequence, a time-line, time-information and delay management as information to the controller. The planning and/or sequencing function of the AMAN aims to reduce controller workload.
3.2 AMAN systems can be a useful tool provided that the design is adapted to the local operational r equirements.
3.3 SARA provides the controller with solutions on speed and route. It has promise to be a useful tool, however the main issues are situational awareness and inter-centre coordination.
3.4 Involvement in the creation of, and feedback on these projects should be sought from controllers in order to assist in their development.
3.5 Point merge reduces the need for radar vectoring and R/T load but on the other hand could result in more track miles to be flown inside TMA at lower altitudes resulting in increased fuel burn.
3.6 For sequencing traffic to a fix or metering points there are various procedures and arrival management systems in use. Their objective is to provide assistance to controllers in the management of the flow of arriving traffic in a particular airspace, to particular points, such as runway thresholds or metering points.
Recommendations
4.1 It is recommended that:
IFATCA Policy is:
IFATCA encourages the development of sequencing and merging tools, provided that:
- They provide controllers with reliable and effective information.
- Local airspace structure, complexity and traffic density are taken into account.
- Integration with other systems and adjacent units is possible.
And is included in the IFATCA Technical and Professional Manual.
References
Boursier L., Favennec B., Hoffman E., Trzmiel A., Vergne F., Zeghal K. (2007) 7th USA/Europe Air Traffic Management Research and Development Seminar: Managing arrival flows without heading instruction. https://www.atmseminar.org/seminar.cfm?seminar_id=7
Forseth A., (2011) Experiences with the Point Merge System (PMS) for arriving traffic to Oslo Gardermoen airport.
Eurocontrol (2011) Point Merge: Improving and Harmonising Arrival Operations with Existing Technology. https://www.eurocontrol.int/eec/public/standard_page/proj_Point_Merge.html
Favennec B., Symmans T., Houlihan D., Vergne K., Zeghal K. (2010) Point Merge Integration of Arrival Flows Enabling Extensive RNAV Application and CDA – Operational Services and Environment Definition. https://www.eurocontrol.int/eec/public/standard_page/DOC_Report_2008_003.html
Eurocontrol (2010) Arrival manager: Implementation Guidelines and Lessons Learned, edition number 0.1.
Eurocontrol (2010) Arrival manager: Status review 2010, edition number 0.1.
Air Traffic Control the Netherlands (2009) VEM Effect Report:Operational Trial Speed and Route Advisor (SARA) D/R&D 09/007 version 1.0.
Knowledge & development centre (2009) Speed and route advice (SARA). https://www.kdc-mainport.nl/index.php?option=com_content&view=article&id=14%3Aspeed-and-route-advisor-sara&catid=2%3Aprojecten&Itemid=3&lang=en

