
DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
51ST ANNUAL CONFERENCE, Kathmandu, Nepal, 12-16 March 2012WP No. 84Study Controlled Time of Arrival ConceptPresented by TOC |
Summary
This paper studies the concept of Controlled Time of Arrival (CTA) in Air Traffic Management (ATM) as achieved by Required Time of Arrival (RTA) function of aircraft Flight Management System (FMS). RTA function enables an aircraft to pass a waypoint at a predefined time. CTA concept uses this capability in sequencing arriving traffic to the Terminal Area (TMA) by assigning such fix times to aircraft. CTA and RTA are considered by the industry to be the first step towards full 4 Dimension (4D) Trajectory Based Operations (TBO). IFATCA has studied 4D Trajectory concepts and FMS functions in recent years. This paper describes a typical RTA function in FMS and projects, where CTA has been trialled to optimise arriving traffic streams. Equipage rates, new FMS development, datalink and ATM processes are discussed. Expected benefits and issues of concern are identified, and provisional IFATCA policy is proposed by this paper.
Introduction
1.1. IFATCA Technical and Operations Committee (TOC) has investigated 4D Trajectory Concepts in 2008 and studied the operation of Aircraft Flight Management Systems in 2011. As a follow-up from these, further study of Required Time of Arrival was included in the TOC work program of 2012. The title was changed to “Controlled Time of Arrival concepts” to cover ATM applications. Related topic of Merging and Sequencing has been studied by TOC this year (B.5.6).
1.2. The FMS of several modern commercial aircraft include the RTA function, which enables the aircraft to pass a waypoint at a time specified by the pilot.
1.3. The use of this capability with the management of arriving traffic is called Controlled Time of Arrival (CTA). CTA concept can include:
- System for assigning time constraints to a waypoint (Arrival Manager)
- Means of communicating trajectory between aircraft and ATC
- RTA capabilities of an FMS
1.4. There is no official ICAO terminology or definitions for RTA or CTA. The industry generally refers to “RTA” as an airborne capability of FMS, while “CTA” is described as an ATM imposed time constraint on a defined merging point associated to an arrival runway (SESAR). The terms “Controlled Time Over” (CTO) and “Time of Arrival Control” (TOAC) have been used in similar context with en-route and general applications.
1.5. CTA concepts have been studied and tested in number of trials around the world. Usually the goal has been to improve arrival sequencing and facilitate Continuous Descend Arrivals (CDA) by reducing the need for holding and low level vectoring. Trials range from Air Traffic Flow Management type of application (ie. Airline delay cost management) to controlling times in tactical ATC operations.
1.6. Trials have demonstrated that there are number of issues to be solved before a wider implementation of RTA based CTA operations is possible. These include managing mixed mode operations with aircraft of variable capabilities of FMS RTA function and datalink communications, defining value of time tolerance, and retaining flexibility with extended arrival control horizon. Improvements in the meteorological information and its use by FMS are also needed.
1.7. 4D Trajectory based operations is seen by the industry as the future of Global Air Navigation in timeframe of years 2020 – 2025. CTA concepts as based on RTA function of FMS are founding steps to this direction.
Discussion
2.1. IFATCA
2.1.1. 4D Trajectory Concepts has been investigated by TOC in 2008. Working Paper No.86 from the Arusha Conference presented a comprehensive insight into the subject. The paper described the trials and applications in Sweden, USA and Australia. 4D trajectory concepts of negotiation and contract were explained. For this process, the need for reliable datalink communication was noted. Mixed mode operations with 4D Trajectories were also discussed, as phased implementation was foreseen. Information in this working paper is still very valid.
2.1.2. In the Annual Conference of 2011 TOC presented a Study on the operation of Aircraft Flight Management Systems (WP No.93). This paper explained background, features and functions of current FMS’s in detail. Regarding RTA function, this study already brought up some possible issues affecting ATM applications. The study concluded overall that capabilities of FMS vary greatly between aircraft and the design of FMS does not necessarily incorporate the requirements of an ATM system. Still, more and more ATM applications are based on certain FMS functions (like RTA) and proper interaction of ATM system and FMS is becoming much more crucial.
2.1.3. As a result of these two conferences, two relevant policy statements about 4D Trajectory Concepts (AAS 1.9.) were added to the IFATCA Technical and Professional manual:
| The flight management system shall accept ATC requirements as compulsory requirements.FMS performance shall be harmonized with ATM system design. |
One provisional policy was also added:
| Airspace must be designed to support 4D trajectory management. |
2.1.4. IFATCA policy of Mixed Mode Operations (ATS 3.14.) is also directly applicable to CTA concepts as described in this study.
2.1.5. IFATCA technical policy statements on Required Navigation Performance (RNP) & Area Navigation (RNAV) (AAS 1.4.) and Air Ground Datalink (AAS 1.5.) requiring controllers to be presented with information about navigation capabilities and datalink equipage of aircraft apply to most CTA concepts.
2.1.6. IFATCA Statement on the Future of Global Air Traffic Management notes the time element in air traffic control:
“The time element of the 4-D contract seems to have always been a part of air traffic control methods. As described in ICAO PANS-ATM (Doc 4444) “separation may be established by requiring aircraft to depart at a specified time, to arrive over a geographical location at a specified time, …”. The 4-d time element is an important part of strategically managing traffic – even after departure. The ATM system needs to be able to use time precisely for this purpose, for example accuracy to within a second of time, and when required a requirement within 15 seconds of the time.”
2.2. Current Aircraft Flight Management Systems
2.2.1. A number of modern FMS equipment includes the RTA function. This automatically arranges aircraft speed and vertical profile to meet a time constraint pre-entered at certain waypoint. This study describes how RTA function is operated in some FMS ́s of the common aircraft types like Airbus 320 and Boeing 737NG.
2.2.2. It should be emphasized that there is a wide variety of FMS types with different functions and capabilities. There could be differences between aircraft of the same type, as operators have different brands of FMS equipment which use different methods of calculation to achieve RTA. Sometimes even different levels of RTA capabilities are enabled with the same FMS type. Only automatic features of FMS are covered in this study. Other means of complying with time constraints exist, where pilots adjust their airspeed manually.
2.2.3. The RTA function is usually part of the vertical navigation (VNAV) capabilities of an FMS. VNAV aims to predict and optimize the vertical profile by controlling pitch and throttle. Expected lateral route, altitude and speed constraints, and wind information are taken into account in this calculation. Selected Cost Index value will also affect the vertical profile and speeds during descent.
2.2.4. When an RTA constraint has been entered to a waypoint, FMS manages the airspeed to meet the target time through the automatic throttle system. The RTA function overrides the most economic speed and vertical profile (Cost Index). In RTA mode, FMS can use speeds down to “minimum clean” or “green dot speed” for time to lose and almost up to maximum speed (Vmo – 10/Mmo -0.02) for time to gain. In some FMS ́s it is possible to set maximum and minimum speed limits for each phase of flight. These would also limit speeds for the RTA mode.
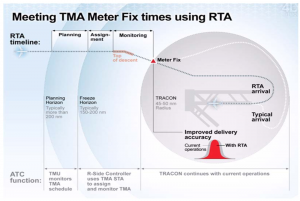
2.2.5. In practise, entry of RTA constraint needs to be done quite early in a cruise phase, before top of descent (TOD) to be achievable. The top of descent is calculated by FMS VNAV to be the point where most optimum descent from cruising level would commence. For correct calculation, the FMS needs to “know” the expected lateral route including the Standard Instrument Arrival (STAR) and the landing runway.
2.2.6. In some FMS ́s RTA can be entered already on ground before departure. In this case FMS calculate and display the take off time, or time window, which would enable RTA to be achieved.
2.2.7. Correct wind information from several altitudes is crucial for FMS to be able to meet the required time. The typical FMS uses wind direction and speed from three to six altitudes in its VNAV calculation. Wind data could be entered manually by pilots or uplinked from company database. Typically, some forecasted wind data is used, which could be considerably different from actual conditions. This wind variation can cause RTA constraint to be missed.
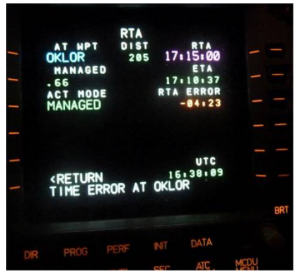
2.2.8. If, at any point, FMS calculates that RTA is not achievable within tolerance, it gives an error message (e.g. “RTA ERROR” or “RTA UNACHIEVABLE”) and also displays the time difference.
2.2.9. The tolerance on how precisely time constraint is achieved differs between FMS types. Usually a tolerance of ± 30 seconds is supported. Most sophisticated FMS’ allow crews to modify the tolerance to any value between ± 5 and 30 seconds. A tighter tolerance makes it increasingly more challenging for the FMS to achieve RTA reliably. A tolerance of ± 30 seconds would allow the FMS to correct for wind variation quite smoothly. FMS algorithms might use greater tolerance value for calculation when long distance (e.g. 2000NM) remains to the waypoint.
2.2.10. Usually RTA may be entered at any waypoint on the flight plan in the FMS. Constraint can be “AT”, “AT OR BEFORE”, or “AT OR AFTER”. Time value can be entered in accuracy of seconds.
2.2.11. Current FMS types support entry of the RTA constraint to one waypoint only. If a constraint is entered to another waypoint, the previous one is deleted.
2.2.12. The time constraint is also deleted if aircraft enters a holding pattern, executes a go-around or suffers an engine-out situation.
2.2.13. The time reference used in FMS is typically the GNSS time. However, some older aircraft require manual input of time in their FMS. Also, some FMS is rounding the GNSS time to a nearest minute. According to ICAO Annex 11 ± 30 seconds time accuracy is needed in general operations and ± 1 second if datalink communications will take place.
2.3. Airline ‘s aircraft fleet equipage
2.3.1. Although an automatic RTA function is included in the FMS of modern commercial aircraft types like the Airbus A320 and Boeing 737NG, a majority of aircraft still do not have this capability. Especially noteworthy is that FMS of even modern regional aircraft (EMB170/190) are missing this function.
2.3.2. In 2008 Eurocontrol analyzed the civil aircraft fleet in the ECAC area for different FMS functions available at the time. RTA function was noted to be available in 27 % of aircraft, which would correspond to 45 % of flights in ECAC area. The same study estimated that in 2018 RTA capability would be found in 30 % of aircraft corresponding 47 % of flights, if there are no additional mandate/regulation to equip.
2.3.3. A survey by IATA to aircraft operators in 2010 showed similar results about RTA equipage.
2.4. Controlled Time of Arrival
2.4.1. It has been generally realized that there would be significant benefits if merging traffic streams into Terminal Areas are better synchronized and the need for holding or vectoring at low altitude is reduced. Traffic sequence and possible delay would be arranged earlier and higher in the cruise phase of a flight. This would decrease fuel consumption and noise footprint, but also could enhance the predictability of traffic flow and reduce controller workload.
2.4.2. Controlled Time of Arrival concepts aim to improve this synchronization. The RTA function of FMS is one of the principal enablers of CTA operations. Other means to achieve time constraints is a controller tactically, or with system support, arranging flights to pass a fix at a certain time. Or the pilot adjusting their speed manually to meet a time constraint.
2.4.3. The Arrival Manager (AMAN) is essential part in CTA concept. This ground-based system predicts trajectories and defines sequence of arriving flights. Time constraints to a metering fix, or fixes, are calculated when necessary; these constraints would be used as CTA times to aircraft. Arrival Managers are described in working paper under agenda item B.5.6 “Study Merging and Sequencing Concepts”.
2.4.4. A method of communicating trajectory information is also required. Messages used in CTA negotiation could be quite complex and long. Therefore, some type of air ground datalink communication appears to be more suitable than voice communication.
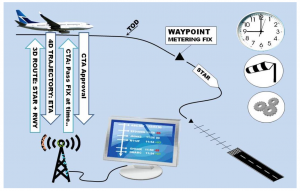
2.4.5. The simplest process of negotiating a CTA “contract” begins with uplinking of expected arrival route and landing runway to an aircraft. It is followed by the aircraft downlinking its estimated time of arrival over the specified waypoint used as a metering fix. Then, if necessary, a time constraint is defined by the ground system and uplinked to the aircraft.
2.4.6. Once a CTA “contract” has been agreed, aircraft is expected to pass a fix within specified tolerance. Controllers are expected to provide clearances, which allow aircraft to achieve CTA without interruptions. Vectoring, re-routing and speed control can result CTA to become un- achievable and thus are supposed to be used only as a last resort.
2.4.7. Advanced CTA concepts can use number of additional downlinked flight parameters and negotiation messages. Trajectory prediction in ground systems would be enhanced by utilizing Aircraft Derived Data (ADD) on accurate descent profile, speed profile and achievable time windows. More negotiation messages (CPDLC) will facilitate e.g. rejection and re-negotiation of CTA constraints. Distribution of up to date wind and temperature information is also needed for more precise CTA achievement.
2.5. Eurocontrol CTA/ATC Integration Studies (CASSIS)
2.5.1. Stockholm-Arlanda Airport in Sweden has been the location of several CTA projects jointly administered by Airlines, ANSPs, research institutions and equipment manufacturers. These projects culminated in extensive flight trials in the operational ATM environment during 2008 and 2009. The work of these projects continues under the SESAR sub-work package 5.6.1.
2.5.2. Over 500 flights participated during five separate trial weeks. These were regular flights by Boeing 737NG, MD-80, Airbus 330 and Airbus 321 arriving at Arlanda Airport at times of low or medium level of traffic. Trial flights were not prioritised and were mixed with other, non-CTA flights.
2.5.3. When required, time constraints were assigned to two metering fixes at Terminal Area boundary to ensure spacing of 120 seconds assuming ± 30 seconds tolerance. Assigning times close to landing runway (FAF or threshold) were trialled few times with tolerance of ± 5 seconds.
2.5.4. Constraints were mainly communicated by voice RT to pilots about 200 NM from the airport. Some trials were made using Aircraft Communication Addressing and Reporting System (ACARS) as a communication/negotiation method.
2.5.5. Results and findings of these projects provide detailed insight into the CTA concept of operations within current ATM system. Besides realising the expected benefits from CTA operations, a number of issues were identified which need to be solved or mitigated before wider implementation of the CTA concept is possible.
2.5.6. Combining time based and distance based control methods proved to be a biggest challenge to controllers. Once a CTA contract is set, all other air traffic control methods to that flight are practically prevented. Still, all aircraft shall be separated by applicable distance based minima. Flights without RTA capability need to be merged into traffic stream by other means than time, like speed control. It is suggested that a controller tool with speed advisories should be available to assist merging non-RTA capable flights into time based traffic flow.
2.5.7. Another major issue is the variability of aircraft speed profiles. In trials it was noted that although aircraft met their CTA constraints quite accurately, the speeds which aircraft passed the waypoint varied extensively. In worst case this might lead to losses of distance based separation minimums before and after the CTA waypoint. It was suggested to consider publishing speed constraints or speed “window” to some of the waypoints along the route. While this would reduce the variance of speed profiles, it would also restrict the ability of FMS to meet the CTA time.
2.5.8. Currently airlines are operating with small cost index value to fly in the most economical way. This typically means a slow cruising speed. If, a CTA constraint is then given requiring time to lose, it might not be possible to reduce speed any further. Preferring the use of “time to gain” has been considered, but it could lead to problems with fuel economy.
2.5.9. Variations in vertical profiles of aircraft have also been noted. This could cause problems in small and constrained airspace. Mitigation could be to publish level restrictions, but these limit the FMS ability to meet the CTA time.
2.5.10. CTA operations with RTA require extended time horizon for arrival management. Limitations of FMS (described in 2.2.5) already require time constraints to be assigned well before a flight is in descent phase. Most likely this involves and affects a number of ATC sectors or even different ATC units. Extended arrival control horizon is usually not supported by Arrival Manager or internal coordination procedures in ATM as of today.
2.5.11. Unforeseen events, like missed approach/go-around, sudden runway change, pop-up flights and adverse weather disturb the traffic sequence. The CTA concept is especially sensitive to these natural features of the air traffic environment. Even the smallest event could invalidate time constraints and it could be too late to re-negotiate any updated times to aircraft in descent phase.
2.5.12. The traffic sequence could also be considerably disturbed by CTA aircraft missing their time constraint for various reasons. In trials it was noted that pilots do not necessarily report to ATC that eventually they are not going to arrive within time tolerance over metering fix.
2.6. Distance Reduction Simulations by Eurocontrol and GE
2.6.1. Since potential for separation loss has been identified with CTA operations (see 2.4.8.7), EUROCAE Working Group 85 formed a “Distance Reduction” subgroup. Simulation experiments were arranged to investigate the different aircraft speed and descent profiles to meet the time constraint, and how those affect the distance between two aircraft which are following the same lateral route to a metering fix.
2.6.2. Eurocontrol and GE completed these simulations independently. Over 30000 aircraft pairs of several types were examined. Also, variety of atmospheric conditions, initial spacing, initial distance to metering fix and initial speed were used.
2.6.3. The results show that with target spacing of 90 seconds over metering fix 82% of aircraft can meet their assigned RTA within ± 10 seconds window. 5 % of those would encounter some separation loss without controller intervention. The highest probability for reduction in distance below 5NM and 1000 ft is when Heavy weight category aircraft (B777 and A330) is following Medium category (A320 and B737) aircraft. This is attributed to different aerodynamic characteristics and gross weight resulting difference in speed and descent profiles. Also, highest likelihood of separation loss occurs when the lead aircraft is more than 50 NM from the metering fix. Using increased target spacing of 120 seconds or limiting the allowable speed range of the aircraft would decrease significantly the probability of a separation loss.
2.6.4. Controllers in these simulations expressed the need for monitoring support tool. It was noted that passive monitoring of aircraft flying towards metering fix with CTA could mean increased workload compared to an active control.
2.7. AIRE II Trials in Amsterdam
2.7.1. In 2011, Trajectory Based night time continuous descent approaches were trialled under the Atlantic Interoperability Initiative to Reduce Emissions II (AIRE II) project at Amsterdam-Schiphol Airport.
2.7.2. Trials affected mainly long haul arrivals during period of 0400 – 0600 local time. Typically 15 – 20 aircraft could be arriving in bunches at that time. Experimental AIRE planner system was used to optimise arriving traffic flow and eliminate need for vectoring and holding. Term “Planned Time of Arrival” (PTA) was used with these trials.
2.7.3. All traffic was requested to participate, regardless of equipage level on RTA function or datalink communication. Non-equipped traffic were synchronised to traffic flow with manual means by aircrew and/or controllers.
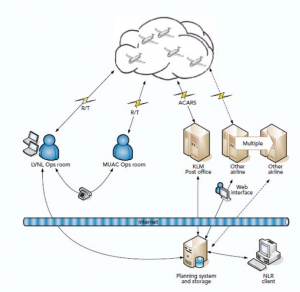
2.7.4. About 85 % of the flights were supposed to be capable of communicating CTA (PTA) messages through airline operators (KLM, Delta) ACARS. Others were accommodated by voice RT and telephone coordination through adjacent centres.
2.7.5. CTA (PTA) communication exchange followed the typical order. Information about the arrival route and runway in use were uplinked around 100 minutes before ETA. Then 90 minutes before ETA, the aircraft would downlink its calculated ETA over Initial Approach Fix (IAF). AIRE planner would assign CTA (PTA) around 80 minutes before and this was uplinked to aircraft for acceptance. Pilots were supposed to inform ATC if assigned CTA (PTA) results in significant speed change.
2.7.6. Three IAF’s at TMA boundary were used as metering fixes. A landing interval of 150 seconds was used, resulting in landing rates of 24 per hour.
2.7.7. Initial findings of these trials are in line with other CTA trials. Mixed mode operations pose challenges to controllers and wind variability cause significant differences in trajectory prediction and in achievement of time constraint.
2.8. Initial 4D of SESAR
2.8.1. The SESAR program in Europe is developing a CTA concept under the name of Initial 4D (i4D). It is considered to be a mid-term step towards full 4D Trajectory operations. Several projects of SESAR are connected to the development of this concept. These projects are expected to deliver improved RTA function of FMS, synchronised trajectory prediction between airborne and ground systems and extended horizon for arrival management. Also, datalink communications in CTA negotiation and set of trajectory management functions and features in ATC systems are developed.
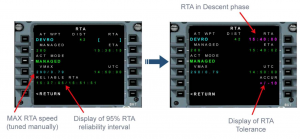
2.8.2. SESAR Project 9.1. is developing aircraft systems to support i4D concept. This work is lead by Airbus, with Honeywell and Thales along as FMS providers. i4D FMS would feature better speed tracking in descent, enhanced vertical guidance and wider RTA speed range. It is supposed to be capable of meeting RTA in descent within ± 10 seconds in 95 % reliability. Improved weather modeling would use wind and temperature information from 10 altitudes in descent. New function of “ETA min/max” would calculate an achievable time window to any waypoint. This could be downlinked through ADS-C with other 4D Trajectory information. New CPDLC messages for contract negotiation would be developed as well.
2.8.3. Under SESAR Sub-Work Package 5.6. “Queue Management” several projects work on CTA related issues. Especially noteworthy is Project 5.6.1. “Ground and Airborne Capabilities to Implement Sequence”. It continues the work of CASSIS projects and investigates procedures and tools to implement sequence by issuing and applying CTAs. IFATCA has been represented in this project. Topics of discussion have been the accuracy of CTA, achievable CTA window size and window validity, and clearances within i4D. i4D+CTA Operational Service and Environment Description (OSED) document is being drafted by the project.
2.8.4. Project 5.6.4. “Tactical TMA and En-Route Queue Management” has been focusing on how to extend arrival management horizon. IFATCA is represented in this project, having identified issue of clarifying control authority when e.g. CTA is assigned across boundaries of Area of Responsibility. Also, lack of progress in enhancing wind models and data acquisition has been noted.
2.8.5. Following i4D, next major step towards full 4D trajectory management is considered to be the use of multiple CTAs. Then FMS would be able to use time constraints over several waypoints. This capability gives much more precision and predictability of the trajectory to ATM purposes. SESAR projects 9.2. and 9.3. are addressing FMS development for Full 4D trajectory management.
2.9. NextGen
2.9.1. The Federal Aviation Administration (FAA) plans in the NextGen to improve traffic management with RTA. This is a goal for the mid-term timeframe of 2015 – 2018.
2.9.2. FAA has a project called 4 Dimensional Flight Management System Trajectory Based Operations (4D FMS TBO).It is evaluating benefits related to TBO and RTA operations, while recognizing the need to integrate RTA and non-RTA capable aircraft in the same airspace in the mid-term. FMS and air traffic operation performance standards are developed by this project for future “time of arrival” – concepts. Current aircraft capabilities are supposed to be exploited in enabling more efficient sequencing of aircraft from en-route to terminal airspace with appropriate spacing.
2.9.3. 4D Flight Management System Standards Validation and Demonstration Plan by MITRE provides description of RTA for current and future operations.
2.9.4. The project has run two sets of 4D FMS TBO -flight trials with Alaska Airlines in Seattle. Boeing 737-700W and 737-800W aircraft participated which had advanced FMS by GE with “intent data link” enabled. Seattle Center (ZSE) sectors handling traffic from south participated with Traffic Manager Advisor (TMA) tool. The first trials in October 2010 were to introduce controllers and pilots to time controlled navigation with existing technologies. Second trials in October to November 2011 were broadening ATC exposure to RTA operational applications.
2.10. Industry standardisation groups
2.10.1. EUROCAE is a non-profit organization of aviation stakeholders in Europe. It develops system performance specifications, which are coherent with relevant ICAO provisions and ARINC specifications. RTCA is similar organization in USA acting as an Advisory Committee for FAA and developing consensus-based performance standards for Air Traffic Control systems. EUROCAE and RTCA are working jointly with several topics as well as with other international aviation stakeholders.
2.10.2. EUROCAE Working Group 85 (WG85) called “4D Navigation” has been initiated to prepare new navigation standards on 4D Trajectory Management to support future ATM needs. Initial 4D as developed by the SESAR program is the first subject in the group agenda. Minimum Aviation System Performance Standards (MASPS) in document ED-75 will be updated for airborne Time of Arrival Control.
2.10.3. EUROCAE Working Group 78 (WG78) and RTCA Special Committee 214 (SC214) are working jointly to develop standards of datalink communication for the NextGen and SESAR. These include safety, performance and interoperability standards on CPDLC and ADS-C for 4D TRAD.
2.11. ICAO
2.11.1. Within ICAO Block Upgrade program Initial 4 D is included in the upgrade package of Block “1- 40”. Element 1 of this package contains general description of Initial 4 D operations, Trajectory Synchronization and Monitoring, and extensive use of RTA. See TOC study this year on ICAO Block Upgrades (B.5.10).
2.11.2. The new version of Performance Based Navigation (PBN) Manual (Doc 9613) introduces Time of Arrival Control (TOAC) in one of its annexes regarding specifications of RNP. However, this version of the manual is expected to be published during first half of 2012 and even then it is uncertain if any performance requirements of TOAC are included. This part of the manual is being developed by the RTCA and EUROCAE working groups.
Conclusions
3.1. IFATCA has two policies and one provisional policy about 4D Trajectory Concepts, which are applicable to Controlled Time of Arrival Concepts. Policies on RNP and RNAV, Air Ground Datalink and especially, Mixed Mode Operations are also very relevant.
3.2. Controlled Time of Arrival concepts promise fuel consumption, environmental and operational benefits. Improvement in merging and sequencing of arrival traffic streams facilitate continuous descent arrivals and predictability of arriving traffic. However, as a trade-off from the extended planning horizon, flexibility and ability to cope with unforeseen events is likely to be affected.
3.3. Flight Management Systems of several aircraft include the RTA function, but majority of current commercial aircraft are not equipped. Also levels of RTA capability vary substantially, even between aircraft of the same type and/or operator. Additionally, the most sophisticated FMS ́s have limitations which affect the implementation of CTA concepts.
3.4. CTA operations require Arrival Manager to define sequence and calculate times and possible constraints over waypoint.
3.5. CTA implementation causes significant mixed mode operations to Air Traffic Management. Aircraft of varied capabilities need to be integrated into same traffic stream with two fundamentally different controlling techniques (time and distance).
3.6. There is also a potential for distance based separation loss between time constrained aircraft due variation in speed and level profiles. Although longitudinally separated by time constraints at the CTA point, flights could get too close to each other following the same route before and after passing the CTA point. This variation could be caused by CTA constraint itself requiring manoeuvring and/or differences in aerodynamic features of aircraft. This risk becomes greater with shorter time spacing between CTA times.
3.7. Differences in trajectory calculations of FMS and Arrival Manager -system could cause difficulties in adherence of CTA time constraints. Up to date wind information from several altitudes is especially crucial to both systems. Also, the system time need to be referenced to accurate time source. FMS needs advance information about expected arrival route, whereas AMAN would benefit from accurate flight parameters.
3.8. RTA and CTA are key elements in the Europe’s SESAR and United States’ NextGen programs, supporting transformation to full 4D Trajectory Based Operations (TBO).
3.9. RTCA and EUROCAE are jointly developing industry standards on navigation and datalink communication for 4D trajectory operations.
3.10. ICAO is in process of adding RNP specifications of Time of Arrival Control (TOAC) in Performance Based Navigation Manual.
Recommendations
It is recommended that;
4.1. IFATCA Provisional Policy is:
IFATCA supports the development and implementation of Controlled Time of Arrival concept provided that;
- Arrival Manager (AMAN) is available to define reliable CTA times.
- RTA equipage level of aircraft is sufficient to support CTA operations.
- Procedures and controller tools are available to integrate RTA equipped and non-equipped aircraft in the same traffic stream.
- Tactical ATC interventions are always possible.
- Accurate wind and temperature data is available.
- Means to communicate the CTA contract with aircraft are available (preferably data link).
And is included in the IFATCA Technical and Professional Manual.
References
IFATCA TOC (2008) 47th Annual Conference Working Paper No.86: Investigate 4D Trajectory Concepts.
IFATCA TOC (2011) 50th Annual Conference Working Paper No.93: Study the operation of Aircraft Flight Management Systems.
IFATCA (2007): Statement on the Future of Global Air Traffic Management, Version 1.0.
Wikipedia (2011): Flight management system (https://en.wikipedia.org/wiki/Flight_management_system)
Airbus (2011): A318/A319/A320/A321 Flight Crew Operating Manual.
Boeing (2011): 737 Flight Crew Operations Manual.
Ernie Stellings, NBAA (2011) Presentation: RTA Capability Status of Flight Operators.
Eurocontrol, UK Civil Aviation Authority (2011): Justification for an Advanced RNP Specification.
Eurocontrol (2008): Initial 4D-4D Trajectory Data Link (4DTRAD) Concept of Operations, Version 1.0.
CASSIS Project (2010): CTA Issues Capture, Version 1.0.
Joel K. Klooster, David de Smedt (2011) Ninth USA/Europe Air Traffic Management Research and Development Seminar: Controlled Time-of-Arrival Spacing Analysis.
CANSO Airspace Issue 12 (2011): Schiphol tests green approaches.
Aeronautical Information Circular Series Netherlands 05/11 (08SEP11): AIRE-2 Trial: Trajectory Based Nightime Continuous Descent Approaces at Amsterdam/Schiphol.
SESAR Joint Undertaking (2008): Description of Work: WP9 – Aircraft, Version 4.0.
SESAR Avionics Workshop presentation (2011): Avionics progress within SESAR programme.
SESAR Joint Undertaking (2008): Description of Work: WP5 – TMA operations, Version 4.0.
David Guerin (2011) IFATCA meeting report: SESAR 5.6.1. Ground and Airborne Capabilities to Implement Sequence.
SESAR Joint Undertaking (2011): 5.6.1 i4D+CTA OSED & Requirements, draft version.
Bernhard Daenzer (2011) IFATCA meeting report: SESAR 5.6.4. Tactical and Enroute Queue Management.
NextGen Four Dimensional Flight Management System Trajectory Based Operations (4D FMS TBO) Project Presentation (2011): FAA/NASA ATD-1 Program Review.
ICAO Performance Based Navigation Study Group (2011): PBN Manual Update, E-Review Version 08 JULY 2011.

