DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
47TH ANNUAL CONFERENCE, Arusha, Tanzania, 10-14 March 2008WP No. 88Study ADS-B Applications – Used in ITP
|
Summary
Automatic Dependant Surveillance – Broadcast (ADS-B) use is evolving quickly. The proposal before one of the ICAO Panels (Separation and Airspace Safety Panel (SASP)) is to use ADS- B data, broadcast from an airborne aircraft, to display this in the cockpit of another aircraft capable of ADS-B in (or receive). This data will be used to provide a separation standard available for use in Oceanic areas that will allow pilots to request a level change. This will provide enormous flexibility and fuel savings for long haul aircraft with increased probability of preferred levels. TOC has been asked to follow this work in SASP and to report the findings and issues for its possible implementation.
This paper also considers whether this proposed ATC separation standard should be in fact a delegation of separation to the pilot. This working paper is recommended as information material only.
Introduction
1.1 The use of Automatic Dependant Surveillance – Broadcast (ADS-B) in an airborne capacity has many possibilities. The concept of aircraft monitoring their own separation, vigilantly using the broadcast information of other aircraft displayed in the cockpit is not only feasible but reality.
1.2 The potential concerns for Air Traffic Control (ATC) will stem from the proposed concept, procedure development and implementation. The complex issues of hardware compatibility and realistic future fit specifications are some of the challenges facing the technical domain.
1.3 Separation from the cockpit is not a foreign concept to ATC. We use it daily with visual requirements given to aircraft to ‘sight and follow’ or ‘sight and maintain separation from’. The important difference to our current ATC separation standards is that the proposed standard is a ‘pilot initiated (but still an) ATC separation standard’, not a separation standard that ATC determine in a ‘fit for purpose’ method. They also involve a series of complex and possibly confusing phraseologies and are using aircraft data extrapolated from Global Positioning System (GPS) that may or may not meet the required integrity and accuracy provisions.
1.4 The data that pilots will use is real time (some minor latency) positional and directional data supplied by the GPS and just like ADS-B Non Radar (NRA) use, the integrity of the data is very important and how the pilot will know about this (regulations and specifications) is also critical.
1.5 Another difference for ATC is that while this is a pilot initiated procedure, it is not the same as such procedures as a ‘track offset’ where pilots may do this without ATC approval. This procedure, while being pilot initiated, has to be approved by ATC, by issuing an ITP clearance and ATC must provide separation from all other aircraft that aren’t involved in the manoeuvre. This will lead to some complexity and adequate training and procedures will be required.
1.6 The intent of this paper is to give a brief outline of the ADS-B In Trail Procedure (ADS-B ITP), where the development currently is at and to detail what some of the issues are for ATC. This paper is not conclusive. The procedure has only recently been proposed and the work by ICAO through the Separation and Airspace Safety Panel (SASP) has only has begun. As of the completion of this paper for the 2008 Arusha Conference, SASP have not determined the communication requirements and have only begun to develop the draft for the PANS-ATM amendment. This new procedure may require an update in the 2008/2009 IFATCA Technical work program.
Discussion
2.1 The concept
2.1.1 ADS-B ITP is the process whereby Global Navigation Satellite Systems (GNSS)/Global Positioning system (GPS) and ADS-B data is used to apply distance based longitudinal separation.
2.1.2 GNSS or GPS is an autonomous geo-spatial positioning system with global coverage. GNSS/GPS allows electronic receivers to determine their location (longitude, latitude, and altitude) to within a few metres using time signals transmitted along a line of sight by radio from satellites.
2.1.3 ADS-B is a function on an aircraft or surface vehicle that periodically broadcasts its state vector (horizontal and vertical position, horizontal and vertical velocity etc, as determined from the GNSS/GPS) and other information. ADS-B can’t function without a system to provide this information – ADS-B systems currently need GPS/GNSS to provide the data so it can broadcast this for reception by both airborne and ground receivers.
2.1.4 For the proposed ADS-B ITP, the manoeuvring aircraft (in this case could be trailing or leading) obtains the relevant ADS-B data, including flight identification (Flight ID), altitude, and ground speed from the non-manoeuvring (leading or trailing) aircraft. Based on this ADS-B data, a pilot can make an in trail climb or descent request to ATC. Since the procedures are designed for use in a mixed mode environment (aircraft operating with/without ADS-B and different Required Navigation Performance (RNP)/Required Communication Performance (RCP) etc, the controller must maintain all separation responsibility. An aircraft requesting to use these procedures must be equipped with an ADS-B transceiver. They will also require the necessary on-board systems to provide the validation and presentation of this data in a means fit for purpose and with the necessary approval. The motivation behind this proposal is the significant limitation of today’s oceanic procedural control standards. Using standards such as 10 min or 50NM in some areas/circumstances) is far too restrictive and airlines are demanding more flexibility, especially to be able to climb to an optimum preferred level.
2.1.5 The ITP is comprised of six possible combinations. The geometry of which is determined by the desire and location of the aircraft(s) requesting the procedure. This will include:
- Leading climb
- Leading descent
- Following climb
- Following descent
- Combined climb
- Combined descent
2.1.6 Enormous benefits are attainable to operators who choose to equip. This is through the ability to perform these in-trail manoeuvres to achieve optimum altitudes. This could result in more efficient and predictable flight profiles (once majority aircraft equipage of ADS-B Out) thereby saving fuel and allowing airlines to adjust their value payload.
2.2 Requirements Focus Group (RFG)
2.2.1 A significant amount of work has been done on the proposed ADS-B ITP. The RFG is an international group consisting of members from the Federal Aviation Administration (FAA), Radio Technical Commission for Aeronautics (RTCA), EUROCONTROL, European Organisation for Civil. Aviation Equipment (EUROCAE) and other interested parties. They have completed an ‘In-Trail Procedure in Non-Radar Oceanic Airspace Application Description’ which contains inter alia, the procedure description, airspace characteristics, supporting systems and the operational environment. This document details the similarities between the proposed procedure and that of existing ICAO Distance Measuring Equipment (DME) standards and more importantly the differences. The following is drawn from this document:
2.2.2 The proposed ITP minimum between the ITP and reference aircraft while vertical separation does not exist, shall be 10 NM (this is yet to be fully scrutinized by the SASP Maths sub-group). For all the documentation involving this procedure the aircraft requesting ITP will be classified as the ‘ITP aircraft’ and the conflicting traffic the ‘reference aircraft’. The procedure will only be allowed with one ‘ITP aircraft’ and up to two ‘reference aircraft’.
2.2.3 The criteria for initiating the manoeuvre must ensure that if closing exists then the minimum ITP isn’t infringed. The proposed criteria are:
- no less than 15NM a speed differential of no more than 20kts;
- no less than 20NM a speed differential of no more than 30kts.
2.2.4 The proposed framework for this procedure to work includes the following limitations:
- the altitude difference between the ITP aircraft and the reference aircraft is 3000 feet or less;
- the ITP equipment indicates that the angle between the tracks of the ITP aircraft and reference aircraft is 30° or less; and
- climb/descent conducted at no less than 300’ per/min;
- conducted at the aircraft’s cruise mach no.;
- no speed, altitude or route change clearance is issued to the reference aircraft until completion of the ITP procedure;
- the maximum closing Mach speed differential is Mach 0.04;
- different distance requirements depending on the closing ground speed.
Note – while the pilot will use ground speed as per the indications on the cockpit display. The ATC must use Mach no. to establish the use of the standard.
2.2.5 Prior to the request of an ITP the pilot shall ensure that:
- The aircraft has the right approved equipment which provides the flight ID, flight level, same direction status, ITP distance and ground speed differential of other aircraft with qualified ADS-B data.
- Airline Operations Specifications (OpSpecs) and operations manual permit use of ITP on the aircraft.
- Flight crew of the ITP aircraft are qualified.
2.2.6 It is expected that there will be four steps involved in the ITP process, namely, initiation, instruction, execution and termination. Each step has considerations summarised below:
Initiation
This step includes identifying and analysing all the points to qualify for the procedure, these will include the level required, the restricting traffic, validating the ADS-B data from the reference aircraft, speed differentials meet criteria etc.
Instruction
Controller approval is determined by assessment of all traffic affected and maintaining separation with all other aircraft (including the reference aircraft by applying this ITP longitudinal separation, and other aircraft by traditional separation standards). ATC will be responsible for ensuring that the reference aircraft will not be issued with a speed, altitude or route change during the procedure and the positive differential is no more than 0.04 Mach. Following approval, the pilot will confirm that conditions that meet the criteria for the ITP are still met.
Execution
Pilot commences the level change immediately after receipt of the clearance (after re- checking required distance), maintains cruising Mach number through the climb/descent; maintains a minimum of 300 fpm climb/descent rate; reports reaching the new flight level. The pilot is not required to monitor the ITP distance during the manoeuvre, if termination is required, ATC must be notified immediately and if communication is not possible or unduly delayed, published contingency procedures shall be implemented.
Termination
ITP completed once manoeuvring aircraft has reported maintaining the new level.
2.2.7 One of the important differences to the application of an ICAO DME standards is that direct controller-pilot communications may not be required (still being discussed) and that third party High Frequency (HF) relays via radio operators may be acceptable. This will mean that some latency will be involved from initial request to approval and thus the procedure will have strict process that requires the pilot to re-check the distance and any closure rates. Secondly, the controller will only receive a request for the procedure, including the flight ID of the reference aircraft, once the potential manoeuvring aircraft has established that the required distance is possible with all considerations of closure etc being met. The controller is responsible for ensuring that other non-involved aircraft aren’t affected (and are therefore sufficiently separated from all aircraft involved) by this request and to approve/deny it as required. Thirdly, all of the information used by the pilot to make this decision is derived and formulated by the ITP equipment. This will include a combination of GPS/GNSS – ADS-B – and ITP/ Cockpit Display of Traffic Information (CDTI) equipment processing the information.
2.3 ICAO
2.3.1 The Aeronautical Surveillance Panel (ASP) came to Separation and Airspace Safety Panel (SASP) with a request to develop suitable minima for ADS-B ITP. This was along with a directive from the Air Navigation Commission (ANC). SASP had a specific task with a timeline of the end of 2008. Australia (Air Services Australia) continued to provide resource to SASP, given the work they had already been doing. The result was that at the SASP meeting in November 2006, the safety assessment and collision risk modelling (undertaken by National Aeronautics and Space Administration (NASA)) was presented to the SASP math-sub group who provided further input and requested a number of changes to be made. At the meeting in Montreal in June 2007, that work was progressed substantially with the math group requiring some more issues to be resolved before they would be in a position to fully approve the risk model. The math group of SASP has undertaken further work and reported at the last meeting in November 2007 (WP 18 ITP Oceanic Safety Assessment) and concluded that additional work must be done for intersecting/diverging tracks of 1-30 degrees.
2.3.2 The safety risk analysis of the ITP procedure included probability calculations of longitudinal overlap. This is being calculated for the following errors and affecting sources:
- Position error
- Velocity error
- Altitude error
- Latency error
- Winds
Previous SASP safety analyses of overlap probability and collision risk for similar distance based separation procedures have not used wind as a contributing factor in the calculations. In the analysis reported in Working Paper 18, it considers the surveillance error and adds a wind model to the longitudinal overlap probability. Risk analysis has also included the issues of both track offset (Strategic Lateral Off Set (SLOP)) and +/- 5% of True Airspeed (TAS) variation without ATC notification as per ICAO Annex 2 Rules of the Air.
2.3.3 The IFATCA SASP representative at this November meeting presented WP 19 – ITP PANS-ATM AMENDMENT PROPOSAL. The SASP has discussed if it was appropriate to begin drafting an ICAO Doc 4444 Air Traffic Management amendment at this time, considering that the ITP work and trials are not yet finalized. It was agreed that the drafting of the amendment could be done in parallel with, and subject to the outcome of the on- going ITP work. This would also facilitate the identification of issues that need to be verified in ITP trials.
The amendment proposal was discussed and amended during the meeting. The current amendment proposal from SASP is provided as attachment A and will be subject to further work at the next meeting(s).
In addition to providing an ICAO Doc 4444 Air Traffic Management amendment for ITP the SASP will also write an ICAO Circular for ITP implementation guidance. The Circular will be based on a modified version of the application description document written by the RFG. The Circular will clearly describe the ITP for both pilots and controllers.
In addition the following issues will be included in the Circular:
i. The results of the collision risk modelling.
ii. The identified hazards with proposed mitigation measures.
iii. Reference to avionics equipment and software specification.
Reference to operational approval documents listing the responsibilities of States and Air Navigation Service Providers (ANSPs) for approving ADS-B in-trail procedures in their area of responsibility, including pilot and ATC training requirements.
2.4 Australia
2.4.1 Australia has been working with NASA and has dedicated resources to establish procedures and trialling ITP. Presently it is waiting on the completion of the work by SASP and to get preliminary approval by the regulator (who tends to wait until the ICAO Air Navigation Bureau (ANB) is satisfied with the work of the necessary panels).
2.4.2 Trials in a simulated environment have commenced in Melbourne. The work’s findings are yet to be published but the following information has been released. The trial was completed by 12 enroute controllers from two procedural groups in Melbourne.
The experiment explored the following issues:
- Is ITP valid from the perspective of an air traffic controller?
- Can controllers apply the ITP standard during simulated flights?
- Do the controllers check all the requirements of ITP?
- Communication Issues.
- Is Controller Pilot Data Link Communication (CPDLC) manageable with the current Human Machine Interface?
- How does the controller manage a request in a ‘paperless environment’ using VHF? x Is ITP acceptable to air traffic controllers?
- Is the level of workload associated with performing ITP manoeuvres acceptable?
- Does ITP integrate with current operations?
- HMI
- Techniques
- Is ITP a useful controller standard?
- Does ITP integrate with current operations?
2.4.3 In general, the debrief identified the following:
- ITP was regarded as being little different to a DME go-through manoeuvre, or use of Automatic Dependence Surveillance – Contract (ADS-C) information for separation.
- In general, ITP represents a shift of workload, rather than an increase in workload.
- While the ‘pilot re-check requirement’ represents a fundamental change in application of a separation standard, it may serve to overcome some of the limitations associated with the provision of standards using HF communications.
- Use of VHF communications and possible confusion associated with use of a third-party call-sign was not seen as a particular problem, as pilots today respond to incorrect callsigns, particularly callsigns similar to their own, and / or fail to respond to their callsign. Several participants considered that any problems are likely to be overcome with training and experience.
- There was some concern with the way the ITP requirements were written and taught for the simulation activities (with initiation criteria, rather than a minimum separation distance), as controllers are not actually aware of the standard they were protecting. It was noted that today, with a potential breakdown of separation the first thing a controller does is pass traffic – with ITP the traffic has technically already been passed once the procedure is cleared.
2.4.4 Based on the information received to date, the work by SASP will be near completion at the end of 2008 and Australia will commence live trials in 2008.
2.5 ADS-B Integrity
2.5.1 In Australia’s implementation of ADS-B (documented in last years working papers) emphasis was put on the integrity of the GNSS/GPS data sent by ADS-B. This is a global issue and has been addressed globally by the RTCA with the DO260A standard become the required standard (potentially Europe/Federal Aviation Administration (FAA)) for full separation services using 1090 Extended Squitter (ES).
2.5.2 Australia has taken a different approach and created laws stating that it is illegal for aircraft to transmit ADS-B data that doesn’t comply with Navigation Uncertainty (NUC) derived from Horizontal Protection Limit (HPL) and not Horizontal Figure Of Merit (HFOM).
This has allowed (after a period of transition) a move away from approving individual airframes for ADS-B use. One issue of airborne use of ADS-B is that an aircraft’s on-board avionics (ADS-B in) must be capable of processing the transmitted integrity data and flag it (or not display it) to the pilot monitoring the CDTI. This standard (NUC value/display requirements) has not yet been developed and the argument is what level of integrity is needed for this procedure? Will it need to be the same standard as that used for ADS-B separation (NUC = 5) or less? These considerations also raise the following questions:
- How will this information be displayed to the pilot on a CDTI?
- Will a filter be required to remove those aircraft that don’t meet the required standard?
- How will the pilot of the aircraft wishing to use ITP know that the data is compliant with HPL derived NUC?
2.5.3 All these issues, even though very technical and not yet covered by SASP, will need to be addressed. At the last RFG meeting in Boston in July 2007 this issue was debated. Some of the points raised included that the RTCA documents will include requirements to notify the pilot if received ADS-B data is not sufficient for ITP. Depending on implementation, the requirements will be fairly generic and may include not displaying any information on traffic with NUC less than 5; or displaying a symbol only without any other detail (like call-sign, ground speed, etc); or using a different symbol.
2.6 IFALPA
2.6.1 IFALPA has commenced discussions on the future of ADS-B. They have draft policy on many of the issues (in isolation and not directly as ADS-B ITP) mentioned above, these include:
- Integrity of ADS-B
- IFALPA APPENDIX ‘RAC-A’ Section 4
- 4.4 Airborne Separation Assistance System (ASAS) DRAFT POLICY 2006
“In any application based on dependent surveillance, the integrity of the airborne position data should be ensured through adequate methods, including performance monitoring.”
- ADS-B applications
- Advanced use of ADS-B
- 4.3 Automatic Dependence Surveillance- Broadcast (ADS-B) DRAFT POLICY 2005
4.3.1 […]
“vii) Advanced ADS-B applications as defined by ICAO documents will require data displayed on the primary navigation display to include traffic symbols and guidance cues.
viii) The system should have performance monitors to alert the pilots of deviations and appropriate procedures to terminate operations safely.
ix) The displays themselves should be able to de-clutter and be range selectable. They may be three dimensional. Information displayed may include predicted wake turbulence.
x) Pilots should be trained in proper operation of the new displays. The training would be required after studies on minimum acceptable levels of training are identified based on pilot performance.”
- IFALPA Annex 2 (RAC)
- Cockpit Display of Traffic Information 2 – Att. C – 1
Responsibility for separation – POL-STAT 2004
“Air traffic separation based solely on cockpit displays of traffic information may not constitute a safe mode of operation. The pilot community should not support the transfer of separation responsibility to pilots in any but the most regulated conditions. The possibility of pilot-induced mid-air collisions under an airborne-based separation scheme may represent an increased risk that has not been recognised by the developers of airborne separation procedures. For a multitude of human factors and technical reasons, the Federation does not recognise the ability of flight crew to perform airborne based separation on a safe and orderly basis using existing ICAO procedures or technology. Therefore, the Federation believes that without validated ICAO-developed operational procedures and ICAO- recognised technology, separation responsibility should remain with the controller on the ground.”
At the IFALPA ATS Committee meeting in November 2007 a Working Paper was presented that discussed developing further policy on ADS-B and indicated that ‘due to the speed at which ADS-B technology is evolving, it requires a constant evolution of said policy’.
The paper has proposed further policy to be adapted for CDTI and ADS-B when used for surveillance. The following is an extract from this paper:
3.2.8 add item 7. Applications
ADS-B required operations shall be designed with the ability to discontinue them when deemed unsafe by the pilot or controller. In all cases, the responsibility for separation and action will be defined and exclusive.
a. Tier one applications
i. Airborne Separation from other aircraft applications- In-Trail Procedures (ITP):
Any changes to the present separation standards shall be opposed until it is proven that the climbing aircraft’s aircrews has timely traffic information on ALL surrounding traffic. This information must meet the same separation and surveillance requirements the controller has as defined by airspace category. (It is being suggested that ADS-B and an HF link to the controller be used for separation reductions for climbs in the NAT.)
ii. Enhanced visual separation and approach – Same as above.
2.7 IFATCA Policy
2.7.1 IFATCA does not have policy on the use of ADS-B or on CDTI being used for ‘separation standards’. This is indeed very new territory for the Federation. IFATCA does however, have policy that refers to CDTI and Airborne Separation Assurance/Assistance Systems (ASAS) and CDTI and Advanced Surface Movement Guidance Control Systems (A- SMGCS). The policy on ASAS could also apply to ITP, except that ITP is proposed to be a separation standard not an ASAS application. IFATCA Manual page 3275 states:
| “Where ASAS-applications are implemented, a clear and unambiguous statement for separation responsibility is required.ASAS-applications shall meet all appropriate safety levels.
The publication of MOPS (Minimum Operational Performance Specifications) for CDTIs by ICAO, or another internationally recognized organisation, is urgently required. New ICAO phraseology shall be developed before ASAS applications are deployed. Identification issues need to be resolved prior to implementation of ASAS applications. Procedures shall be in place to ascertain that any action taken by a crew in the use of ASAS applications will not generate additional conflicts.” |
IFATCA Manual page 32213 states:
| “IFATCA supports development and implementation of Cockpit Display of Traffic Information (CDTI) in A-SMGCS applications to enhance safety and improve the efficiency of airport ground operations, provided that there is no adverse impact on controller or pilot workload.Where any CDTI assurance function will be implemented, a clear and unambiguous statement of the responsibilities between pilots and controllers is required.
International standards should be established for certification and approval of complementary CDTI systems. IFATCA considers the following to be the minimum attributes of CDTI used in A- SMGCS:
|
2.7.2 The integrity of the GNSS/GPS data is important to the integrity of the ITP procedure. There would need to be no doubt that the information the pilot uses is correct and qualifies for the criteria required, this has been highlighted as an IFALPA issue also.
2.7.3 The communication requirement for this procedure has to be established. Discussions have been held in SASP in November 2007 on how this may work. Some of the discussion has proposed the use of phonetics in announcing the reference aircraft, for example ACA861 should be referred to as ‘ALPHA CHARLIE ALPHA, EIGHT, SIX, ONE’. Live trials will help to confirm this strategy and are proposed for the second half of 2008. CPDLC will require new pre-formatted message sets as free text is not allowed to alter a flight profile.
2.7.4 There is a more generic issue of how we manage the ‘controller perspective’ with this procedure. Having an ATC separation standard that we only use ‘when requested’ from a pilot, but remain responsible for, is an unusual concept. The controller is responsible for establishing that no closing mach number of more than .04 exists and that the reference aircraft(s) doesn’t change trajectory. ATC also has to separate all aircraft other than the reference aircraft.
2.7.5 The complexity of mixed mode operations will need to be considered. The current complexity in oceanic airspace highlighted by RNP requirements, Reduced Vertical Separation Minima (RVSM), ADS-C and CPDLC will only further be highlighted by ADS-B functionality and possible ITP requirements. IFATCA has Policy on this (Manual page 32314):
| “In addition to the individual safety case, a system safety analysis should be conducted at the introduction of each and every technology which results in mixed mode operations.The role of the controller as the mitigation must be considered in the context of the level of integration and, for safety assurance, capacity levels must be revised to maintain the required safety level.” |
2.7.6 The results of the simulator trials that have been done and the live environment experiments will formulate an accurate picture of the required human factor/safety issues. IFATCA will need to continually monitor these results and conclusions as this procedure develops.
2.8 Delegation or a ‘Separation Standard’
2.8.1 The current proposal for ITP is written to be used as a separation standard with the controller being responsible for separation. However for the reasons listed below perhaps ITP should be re-written as delegation of separation to the pilot. The problem with this ‘shift’ in view is that the current safety assessments, collision risk modelling and implementation procedures proposed will need re-calculation and review as a ‘delegation’ is far more difficult to assess. The current proposal would be an easier first step and integrates current assessment and modelling methods to produce an acceptable safe outcome.
2.8.2 In the application of ITP using ADS-B it is the pilot who has the best surveillance of the adjacent traffic; that is CDTI using ADS-B in. The pilot will therefore have the best separation intervention capability; that is the pilot will be able to react more quickly than the controller to unexpected events.
2.8.3 The current ITP procedures only has the pilot of the ITP aircraft checking the distance of the reference aircraft twice – first before requesting ITP from the controller and second before commencing the level change after approval of the controller. The pilot is not required to monitor the CDTI during the level change. While SASP may be able to calculate the risk and say that this is acceptable, it is clearly not reducing the risk to as low as reasonably practical by requiring the pilot to monitor the reference aircraft during the level change. It is not acceptable for a radar controller to not monitor a radar screen even though a procedural separation is being used and it should be similar for the pilot.
2.8.4 The reference aircraft may not have ADS-B in and may not even be aware that ITP is being used.
2.8.5 It may be considered unreasonable that the controller is responsible for separation and yet the controller’s information on the relative positions of the ITP and reference aircraft comes solely from the ITP aircraft’s pilot report. The primary difference between this and a DME standard is that all the information is coming from one aircraft. The controller will be aware from their non-ATS surveillance system that the aircraft are in proximity however the ITP standard does not even expect the controller to verify the relative positions of the ITP and reference aircraft.
2.8.6 If ITP using ADS-B was re-written as a form of delegation of separation to the pilot then the requirements for this standard that govern its use become easier to conceptually understand. It is for the pilot as separator to ensure that the reference aircraft are correctly identified, that the CDTI system is operating correctly, that the CDTI is interpreted correctly, that the separation mode is correctly applied and that the trajectories of the reference aircraft continue to be monitored during the application of the separation standard. If an unexpected event occurs and the ITP is unlikely to be completed without compromising the separation minima then the pilot should be responsible for contacting the reference aircraft, passing traffic, etc.
2.8.7 The use of ADS-B by the pilot where there is no ATS surveillance system is expected to significantly increase, therefore ITP is not a single exceptional case but the first of many. It is very important that the most appropriate separator be identified and then the appropriate separation mode developed.
2.8.8 The controller will still need to authorise the delegation of separation, in the draft ITP standard by ensuring that no more than two reference aircraft are affected, that the closing speed is not greater that M.04, and by not altering the trajectory of the reference aircraft during the period of ITP application.
2.8.9 An alternative way of presenting the arguments for and against
One way to describe what has occurred is as follows. The ICAO Concept, IFALPA and IFATCA all require that there be only one separator for a particular situation. Therefore there is a boundary line between cases of when the controller is responsible for separation and when the pilot is responsible for separation. The determination of the position of this boundary line can be where the separator is determined by who has the best intervention capability in case the separation standard starts to fail (for example the best surveillance and communication capabilities). However crossing the boundary line to where the pilot is delegated separation has many issues to be addressed and so ICAO has effectively requested that SASP ‘stretch’ the line so that the controller will remain responsible for separation despite the controller not having the best intervention capability, as illustrated in the figure below:
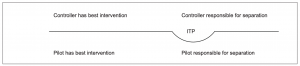
Note that the procedure will still meet the requirements of controller separation safety standards (as calculated by ICAO), however it may not be ‘as safe as practically possible’ as the agent with best intervention capability (based on surveillance and possibly communication capability in this case) is not the assigned separator.
In addition, a number of items that are necessary for the delegation of separation (such as the requirements of pilots and equipment to ensure correct identification of reference aircraft, the measuring of distance using a cockpit display, etc.) will also have to be addressed for the controller separation standard and so it is not saving ICAO all the work but only some of the work required for the pilot to use ADS-B as separator.
2.8.10 IFATCA needs to monitor whether this develops as an acceptable standard for controller use. On the positive side, we are assured by ICAO it is safe and it provides another separation standard for controllers to use. On the negative side, the controller is totally dependent on information from the pilot of only one aircraft (the ITP aircraft requesting level change) as to distance from traffic and relative positions and does not have the best means to intervene if required and yet remains responsible for separation. One option for IFATCA is to accept this as an interim step until full procedures for delegation of separation to the pilot are completed by ICAO.
Conclusions
3.1 ADS-ITP is a pilot initiated procedure that has an enormous cost benefit to the industry. Savings in fuel costs due to a greater expectation of preferred levels is an expected outcome.
3.2 ADS-B ITP is an ‘ATC separation standard’ that is initiated by the pilot, with the required approved avionics on board.
3.3 The integrity of the GPS/GNSS data needs to well defined and easily incorporated into the pilots procedures/avionics for assessing the reference aircraft data.
3.4 ATC still is responsible for approving the procedure and for separation of all aircraft. Controllers must be adequately trained for its use, especially in mixed mode operations.
3.5 Human factor issues including communication need addressing before the introduction of this procedure.
3.6 SASP is working on a draft amendment; maturing this in parallel with the development of the required safety analysis and procedures.
3.7 IFATCA does not have policy on CDTI for use with separation standards, only on its use with ASAS/ASMGCS.
3.8 IFATCA will need to monitor the live trials and further work that is being developed.
3.9 IFATCA will need to consider if ITP using ADS-B is acceptable as an ATC separation standard, as whoever has the best intervention capability has traditionally been responsible for separation.
Recommendations
It is recommended that;
4.1 This is accepted as information material.
References
ATSA-ITP OSED v8.2 (2007.07.26).
SASP_WGWHL12_WP19.
SASP_WG_WHL12_Flimsy 8 ITP PANS ATM change proposal x SASP_WG_WHL12_PT6 Interim.
SASP_WGWHL12_IP07.
SASP_WGWHL12_ ATC ITP Simulations ‘DRAFT 25OCT07’.
IFALPA Appendix RAC-A Section 4.
Australian Manual of ATS.
Australian AIP.
Attachment A – CHAPTER 5. SEPARATION METHODS AND MINIMA
5.4.2 Longitudinal separation
LONGITUDINAL SEPARATION MINIMA BASED ON DISTANCE
5.4.2.7 USING ADS-B IN-TRAIL PROCEDURE (ITP)
Note.— Refer to Circular XX “Name TBD” for guidance material for the implementation of ADS-B in-trail procedure.
5.4.2.7.1 Within designated airspace, or on designated routes, separation minima in accordance with the provisions of this section (5.4.2.7) may be used, subject to regional air navigation agreements.
5.4.2.7.2 Communication requirements go here! ITP requests and clearances shall be communicated using standard voice phraseology as specified in section xxxx of the PANS-ATM or via standard CPDLC message exchange as specified in xxxxx.
5.4.2.7.3 Separation between a climbing/descending ITP aircraft and reference aircraft shall be established based on reported ITP distance between the aircraft obtained by reference to valid ADS- B data. An ITP aircraft shall not be separated simultaneously from more than two reference aircraft using ITP separation minima.
5.4.2.7.3.1 A pilot may request an ITP climb/descent provided the following ITP criteria are satisfied:
a) the ITP distance between the ITP aircraft and the reference aircraft is:
i) no less than 15 NM with a maximum closing ground speed differential of 20 knots; or
ii) no less than 20 NM with a maximum closing ground speed differential of 30 knots; and
b) the ITP equipment indicates that the angle between the tracks of the ITP aircraft and reference aircraft is 30° or less; and
c) the altitude difference between the ITP aircraft and the reference aircraft is 3000 feet or less; and
d) the climb/descent will be conducted at a rate of no less than 300 fpm or any higher rate as required by the appropriate authority; and
e) the climb will be performed at the assigned Mach number. If no Mach number has been assigned by ATC, the ITP aircraft shall maintain the current cruise Mach number throughout the ITP manoeuvre; and
f) the aircraft and crew have an ITP approval.
Note: The distance and speed criteria used by the pilot of the ITP aircraft conducting the climb or descent is designed to ensure a minimum separation of 10NM between the ITP aircraft and the reference aircraft during the climb or descent.
5.4.2.7.3.2 A controller may separate an ITP aircraft from a reference aircraft provided the following conditions are satisfied:
a) the aircraft has requested an ITP climb/descent; and
b) the reported ITP distance between the ITP aircraft and reference aircraft is 15NM or more; and
c) during the ITP both the ITP aircraft and reference aircraft will;
i) operate on identical tracks or tracks that converge or diverge at 30° or less; and
ii) any turn at a waypoint shall be limited to 30° or less.
d) no speed or route change clearance is issued to the ITP aircraft until the ITP climb/descent is completed; and
e) the altitude difference between the ITP aircraft and the reference aircraft is 3000 feet or less at the start of the climb/descent; and
f) no speed, altitude or route change clearance is issued to the reference aircraft until the ITP climb/descent is completed; and
g) the maximum closing Mach speed differential is Mach 0.04,
Note: The required Mach number check may be achieved by:
a) Use of the assigned Mach numbers of the ITP and reference aircraft where Mach number technique is being used; or
b) Requesting Mach numbers from the ITP and reference aircraft; or
c) Any other methodology determined by the appropriate authority.
h) the ITP aircraft is not a reference aircraft in another ITP clearance.
5.4.2.7.3.3 Following receipt of an ITP climb or descent clearance and before initiating the procedure, the pilot of the ITP aircraft shall determine that the ITP criteria are still being met with respect to the reference aircraft identified in the clearance and:
a) If the ITP criteria are satisfied, the pilot shall commence the climb or descent immediately; or
b) If the ITP criteria are no longer satisfied, the pilot shall notify the controller and maintain the previously cleared level.
New figures for the ITP in PANS-ATM:
TBD
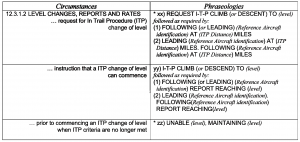
Phraseology
The following new phraseology shall be added to the PANS-ATM.
Definitions
The following new definitions shall be added to Chapter 1, Definitions, in the PANS-ATM.
ITP aircraft. An aircraft that is fully approved (from an equipment, operator, and flight crew qualification standpoint) to conduct an ITP.
Closing ground speed differential. The difference between the ITP Aircraft’s ground speed and a Reference Aircraft’s ground speed that results in a reduction of the ITP distance.
Reference aircraft. One or two aircraft with valid ADS-B data that meet the ITP criteria and are identified to ATC by the ITP aircraft as part of the ITP clearance request.
ITP distance. The distance between the ITP aircraft and the Reference aircraft as defined by the difference in distance to an aircraft calculated common point along a projection of each aircraft’s track in front of or behind the aircraft as appropriate.
Closing mach speed differential. The difference in Mach speed between the ITP aircraft and the reference aircraft that results in a reduction of the ITP distance.
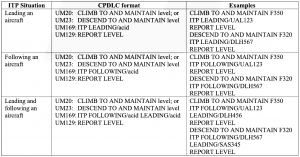
CPDLC procedures
ITP requests and clearances shall be communicated as follows until pre-formatted ITP CPDLC message elements have been implemented:
Downlink ITP request
The pilot shall enter CPDLC ITP clearance requests in the following manner:

(DM6 is a pre-formatted flight level request message element and DM67 is a free text message element).
Uplink ITP clearances
The controller shall enter CPDLC ITP clearance in the following manner:
(UM20 and UM23 are pre-formatted flight level change clearance message elements and UM169 is a free text message element).
UM169 shall be provided as a pre-formatted free text message element, when used in ITP clearances, requiring the controller to only enter the reference aircraft identification.