
DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
44TH ANNUAL CONFERENCE, Melbourne, Australia, 17-22 April 2005WP No. 87Produce Definition of Short Term Conflict AlertPresented by TOC |
Introduction
1.1. During the 2004 IFATCA conference, definitions were accepted for Controllers Tools (CTs) and Conflict Detection Tools (CDTs). These definitions were written to provide guidance to Member Associations (MAs) who are asked to assess the introduction of new ATS systems with enhanced functionalities or levels of automation.
1.2. A clear distinction was made between CTs and Safety Net functionalities to ensure each individual system or tool could be assessed in terms of its contribution to a level of safety. There are, however, grey areas when assessing these tools and it is possible to classify a system as both a CT and safety net functionality. One of the more contentious functionalities has been Short Term Conflict Alert (STCA).
1.3. The purpose of this paper is to recommend a definition of STCA, to make IFATCA policy clear to MAs.
Discussion
2.1. Controller Tools
2.1.1. CTs are defined in the IFATCA Technical and Professional manual as follows:
| Controller tools are automated functions of a developed ATS system that enhance a controller’s ability to meet the objectives of ATS. They provide information that assists a controller in the planning and execution of their duties, rather than dictating a course of action. |
2.1.2. In developing this definition, the distinction was made between a tool that assisted a controller and a tool that formed part of the safety net functionalities. The distinctions are best summarised by the following diagram:
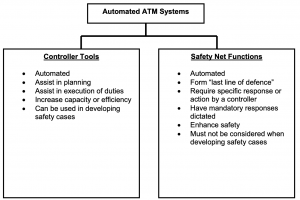
2.1.3 In some cases, it is accepted that a specific functionality could be classified as both a CT and a safety net function. In these cases, the functionality is assessed according to its functional usage rather than its core design – those that form a “last line of defence” against incidents and accidents and those that assist a controller in making decisions. In assessing STCA, therefore it is important to assess a system with reference to its usage and application.
2.2. Conflict Detection Tools
2.2.1. The 2004 Conference accepted that CDTs are computer based CTs that identify conflicts and then provide system generated conflict advice to controllers. These systems could be further categorised by aspects of their operation such as “look- ahead time” and the nature of the alert generated. It was also accepted that Conflict Detection Safety Nets (CDSNs) existed but their purpose was not defined as it was beyond the scope of the paper.
2.2.2. CDSNs are systems that provide last minute collision avoidance of imminent
hazards, often requiring immediate avoiding action without considering other potential hazards. These are seen as being distinctly different from other types of CDTs because of the immediacy of the action required and the nature of the alerts generated. They are designed to form the “last line of defence” against losses of separation or collisions and often controller responses to such alerts are mandated by ANS providers.
2.2.3. These definitions and distinctions are consistent with the approach that safety nets are functions of which the sole purpose is to alert the pilot or controller of the imminence of collision of aircraft, aircraft and terrain/obstacles, as well as penetration of dangerous airspace (IFATCA Manual).
2.3. Short Term Conflict Alert
2.3.1. STCA is a ground based system computer program that relies on surveillance data processing to predict proximity between two or more targets. The program utilises radar information in both the vertical and horizontal planes and predicts the future position of those targets, for a time in the future, determined by a variable system parameter known as the look ahead time (generally +/- 1min). The system then generates warnings to a controller if this prediction will result in less than a set distance (vertically or horizontally) occurring between the targets.
2.3.2. There are no internationally accepted parameters for STCA, however in general terms STCA can operate in two different “modes”; as a separation assurance function or as a collision prevention function.
2.3.2.1. In a separation assurance mode of operation, the STCA parameters will be set to predict when the tracks of two or more targets will potentially be separated by less than the required separation standard. The notification time will be sufficient to allow a controller to recognise and react to an STCA alert and issue instructions to prevent the reduction of separation below the required standard.
2.3.2.2. In a collision prevention mode, the STCA operates to prevent collisions between aircraft with no regard to the required separation standards. The notification time will be shorter than in a separation assurance mode and would allow a controller time to issue an instruction for avoiding action or an evasive manoeuvre.
2.3.3. ICAO defines STCA as follows:
”The objective of the STCA function is to assist the controller in maintaining separation between controlled flights be generating, in a timely manner, an alert of potential infringement of separation minima”
Clearly from this ICAO intended that STCA systems operate in a separation assurance mode, however research indicates that this is not always the case and some ATS providers have chosen to operate STCA as a collision prevention function. Current IFATCA policy is consistent with the ICAO position. It is also interesting to note that ICAO does not contemplate the separations (or collisions) between controlled and uncontrolled flights.
2.3.4. In both modes of operation, however, it is vital that the STCA parameters are set to ensure that the warnings generated for the controller are timely, accurate and appropriate. If parameters are incorrectly set then the system will generate “nuisance alerts” whereby unnecessary alerts are displayed to the controller. If this is the case then controllers have a tendency to become less concerned when system generated alerts occur, thereby reducing the effectiveness of the system. Similarly it is vital that the alerts generated are unique, recognisable and comprehensible to a controller. They may consist of both aural and visual cues to ensure the controller’s attention is attracted to the information in a timely manner.
2.4. Safety Net versus Controller Tool
2.4.1. An STCA function can be classified as either a safety net function or a CT depending upon the system parameters. Different regulatory organisations may dictate different requirements for the parameters and operation of STCA systems and by doing so, determine whether an individual system is a CT or a safety net. The distinction may, however, be unclear to the controller using the system.
2.4.2. Whether the STCA system is protecting against a loss of separation or a near collision does seem to be a rather debatable point. In both cases the system is enhancing the ATS operation by providing automated warnings. Whilst an STCA system protecting against losses of separation may not be quite be the “last line of defence” in preventing an accident, the significance of the automated warning must not be underestimated. These warnings may be used to indicate either a failure or potential failure of a safe system and form part of a layered defence against mid-air collisions.
2.4.3. An STCA function should not be considered when developing a safety case for the introduction of new separations or procedures, unless it can be demonstrated that the functionality is used in a separation assurance mode of operation.
Conclusions
3.1. STCA is a computer program that relies on processed radar data to predict potential conflicts according to variable parameters.
3.2. STCA is a functionality that can be utilised to provide warnings of either a loss of separation or a collision.
3.3. STCA must provide accurate and timely warnings in a manner that is recognisable and actionable for a controller.
3.4. Whilst the parameters of an STCA function may be known to controllers, the alerts generated often do not indicate whether a loss of separation or a collision is imminent or likely. This is unacceptable. The controller display must differentiate whether a CT or a safety net function is activated and the controller should never be in any doubt to what action is required.
3.5. An STCA function can be considered as a CT or as a safety net function, depending upon the system parameters or design.
3.6. Only CTs can be used in safety cases.
Recommendations
It is recommended that;
4.1. STCA be defined as:
Short Term Conflict Alert (STCA) is an automated system that predicts reduction of aircraft spacing to below specified parameters. An STCA function can be used as either a controller tool or a safety net depending upon system parameters.
and be included in the IFATCA manual on page 3 2 1 13.
4.2 IFATCA Policy is:
An STCA function should not be considered when developing a safety case, unless it can be demonstrated that the functionality is used in a separation assurance mode of operation.
and be included in the IFATCA manual on page 3 2 1 13.
References
ICAO Doc 4444.
WP 98 Toulouse 1998.
WP 87 Buenos Aires 2003.
WP 89 Hong Kong 2004.
WP 90 Hong Kong 2004.
Professional and Technical Manual of IFATCA (2004).

