
DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
63RD ANNUAL CONFERENCE, Singapore, 15-19 April 2024WP No. 96A Further Study into Interactions Between Remotely Piloted Aircraft Systems and ATCPresented by PLC |
Summary
TOC and PLC were tasked to investigate numerous matters of concern regarding the system capabilities of Remotely Piloted Aircraft Systems (RPAS). This paper is focusing on Remain Well Clear (RWC) and Detect and Avoid (DAA) functionality; Command and Control (C2) link latency and Lost Link contingency procedures. It looks at the legal implications of this technology on the Air Traffic Control Officer (ATCO) and the requirement to receive sufficient training about RPAS operations.
Introduction
1.1. Worldwide, technologies are being developed, large amounts of research is being conducted and procedures and policies are being proposed for remotely piloted aircraft (RPA) to operate seamlessly alongside conventionally piloted aircraft (CPA). The objective is to be able to safely manage and integrate RPAS into the Air Traffic Management (ATM) System.
1.2. WP 163 – Remotely Piloted Aircraft System – IFATCA Assumptions; delivered in Jamaica 2023 goes into greater depth explaining the concepts of topics covered below and is complementary to this paper. RPA operations are quickly expanding and a highly technical field, thus making procedures and standards difficult to define. Since delivery of that paper, there have been no significant decisions made relating to this topic. At the time of writing this paper, the DAA Manual and the second edition of the Manual on RPAS (DOC 10019) are still in draft format awaiting further IFATCA / ICAO discussions.
1.3. This paper is analysing DAA, C2 link, the need for contingency procedures and implications on ATCO’s and training requirements when controlling RPAS as defined in ICAO DOC 10019.
Discussion
‘Drone’ terminology
2.1. In many regions the terms RPAS and UAS are used interchangeably. RPAS is a subset of UAS. The level of automation and autonomy is conversely related to the amount of pilot interaction required to control a RPA. Generally, if there is pilot involvement, it is referred to as RPAS and when talking about fully autonomous systems, UAS is used.
The ICAO Doc 10019 defines RPAS as:
“A remotely piloted aircraft, its associated remote pilot station(s), the required command and control links and any other components as specified in the type design.”
2.2. When discussing RPAS, it is referring to the entire system which has three main components:
- remotely piloted aircraft (RPA);
- C2 link system (the data link between the remotely piloted aircraft and the remote pilot station for the purposes of managing the flight);
- remote pilot station (RPS).
UAS Classifications
2.3. EASA (European Union Aviation Safety Agency) [EU Regulations 2019/947 and 2019/945] and ICAO model UAS regulations part 102 classify RPAS using a risk based approach factoring the RPAS weight (Maximum Take off Mass (MTOM)), specifications and type of operations.
These categories are:
- Open;
- Specific;
- Certified.
2.4. The Open category carries the least risk. These are generally smaller <25kg MTOM, operate within VLOS (Visual Line of Sight) below 400 ft. Operations that sit outside the open category but not complex enough for the certified category are classed as Specific. [Harvey, 2022]
2.5. The Certified category operate with the highest level of risk and include operations such as medium altitude long endurance operations, surveys, surveillance, military applications or RPAS that carry people or dangerous cargo. [Digital Platform for Unmanned Aviation (DIPUL) Operational Risk Assessment 2023]. In this category operators and RPA will need to be certified and have a licenced Remote Pilot In Command (RPIC). These larger, more technically complex RPAS are the subset of UAS anticipated to require (mandated) to carry a DAA system (consisting of a RWC and CA (ACAS) capability).
DAA and C2 Link
2.6. IFATCA press release (December 2023) advocates a phased approach of segregation, accommodation and integration of RPAS into ATMS. There are many issues that need to be addressed to ensure that there is a seamless service provided to all airspace users with manned airspace users maintaining existing operational capacity and safety standards.”
2.7. The specific areas that are of concern and what impact it will have on ATCO are:
- the system capabilities and collision avoidance actions of RPAS with Detect and Avoid (DAA) system: Remain Well Clear (RWC) and Collision Avoidance (CA) functionality
- C2 link dependability and lost link contingency procedures
- latency both with communications and reactions to control instructions
2.8. RWC and DAA functionality are expected to provide a comparative (equal level) collision avoidance safety function as the ACAS on CPA. These technologies form an integral part of a 3 layer conflict management framework (strategic, tactical and collision avoidance) [ICAO DOC 9854 2005]
2.9. RPAS navigation and performance characteristics differ from CPA. In addition, the latency in C2 links, as well as the possibility of link loss between the Remote Pilot Station (RPS) and the RPA require special contingency and emergency management. [SESAR 2023]
2.10. A robust C2 system with defined parameters and lost link contingency procedures are integral to the successful integration of RPAS. There has to be safe, reliable and continuous communication with the system (RPA and RPAS) and the environments (RPAS and ATMS). [SESAR 2023]
Integration requirements and ATC operations
2.11. To process RPAS in current Air Traffic Management (ATM) systems, IFATCA TPM AAS 1.10 states in the introduction of the policy that:
| …From the air traffic controller’s perspective, the provision of ATS to an UA shall be transparent. This includes all stages of the flight from pre-notification to landing. There should be no difference in RTF, landline communications or transponder data procedures nor should the controller have to apply different rules or different criteria. |
Changes were proposed to this policy in WP94 (Jamaica 2023).
2.12. Integration will require RPAS to comply with international IFR operations, Controlled Airspace procedures and operate in non segregated and also uncontrolled airspace safely. RPAS will need to conform to ATC procedures and communication requirements. They need to be able to interact with ATC and CPA without impacting the safety and efficiency of other airspace users. Issues relating to interactions between UAS and ATC were highlighted in WP 94 presented in Jamaica 2023.
RPAS training
2.13. IFATCA TPM AAS 1.10 operational use of Unmanned Aircraft (UA) states that:
| ATCOs shall not be held liable for incidents or accidents resulting from the operations of UAS that are not in compliance with ICAO and/national and/or local regulations. |
and,
| Standardised procedures, training and guidance material shall be provided before integrating RPAS into the Civil Aviation System. |
There is a necessity to ensure that ATCO receive sufficient training regarding RPAS capabilities relevant to their operations. The training should be not limited to, but include the concepts that are highlighted in this paper. It is recommended that ATCO RPAS training be added to the TPM.
2.14.RPA itself being a whole new category of aircraft, that brings its own capabilities and characteristics and new aircraft systems embedded, we have to take into consideration the adaptation of the current curriculum for the ATCO courses and programmes as ab-initio, Unit training plans, Refresher training, Abnormal and emergency situations training etc.
DAA System (RWC and CA) capability in the Conflict Management Framework
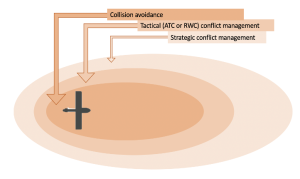
2.15. The conflict management framework is a multi layered SMS (safety management system) which incorporates ICAO Annex 2 Rules of the Air. It is used in ATM systems for limiting, reducing and/or mitigating the risk of collision between aircraft and other potential hazards as described in ICAO GLOBAL ATM Operational Concept (2015). This conflict management framework is comprised of 3 main layers:
- strategic,
- tactical, and
- collision avoidance.
2.16. Strategic conflict management is applied in the pre-flight phase. It can be achieved through elements like airspace design, capacity management and flight planning. In this phase, an operator can be notified and made aware of airspace restrictions, ground constraints and other known hazards prior to departure.
2.17. Functional Allocation Approach for Separation Assurance for Remotely Piloted Aircraft 2022 states that:
“In the tactical layer, provision of a safe distance or time between aircraft is applied. ATC separation and CPA see and avoid procedures sit in this layer. In this framework, for RPAS the tactical level process RWC supports the RP and the Detect and Avoid (DAA) system is required to implement the collision avoidance function.”
2.18. Collision Avoidance (CA) procedures must activate when the strategic and tactical separation have been compromised. DAA CA functionality are used in this layer and can be compared to the Airborne Collision Avoidance System (ACAS) function for crewed aircraft.
RWC – Remain Well Clear
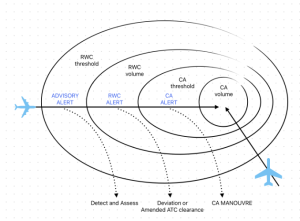
2.19. ICAO defines RWC as “The ability to detect, analyse and manoeuvre in order to ensure that a UA is not being operated in such proximity to other aircraft as to create a collision hazard.”
2.20. As part of the DAA system, the RWC function assists the remote pilot (RP) by providing real time information and alerts on hazards. It is essentially giving the RP the ability to electronically see and assess other traffic using data from on board sensors. Potential hazards are not only other airborne traffic but will also include terrain, hazardous meteorological conditions, ground operations and other airborne hazards.
2.21. The proposed second edition RPAS manual (currently in draft) suggests that upon receiving an RWC alert, the RP determines if they will require a deviation from flight plan or request an amended ATC clearance to avoid the known hazard if deemed necessary. In other terms its serves to aid the RP in complying with the right of way rules defined in ICAO Annex 2 (Rules of the Air)
2.22. IFATCA TPM AAS 1.22 RPAS Assumptions states that:
| … the remote pilot cannot manoeuvre the RPA in accordance with a Remain Well Clear notification without an ATC clearance |
DAA – Detect and Avoid
2.23. The ICAO definition of DAA is:
“The capability to see, sense or detect conflicting traffic or other hazards and take the appropriate action.”
2.24.Defining exactly what RPAS DAA systems and its capabilities is complex and somewhat controversial. WP no. 163 RPAS IFATCA Assumptions explained that “DAA system shall provide two functions: the Collision Avoidance (CA) function and the Remain- Well-Clear function (RWC)”
2.25. In the third Collision Avoidance layer, CA may be achieved through use of an approved DAA capability for conflicting traffic. If installed, a DAA system for conflicting traffic should alert the remote pilot of impending collisions in order that last resort actions or manoeuvres can be executed. [ICAO Manual on RPAS 2015].
Comparison with ACAS (Airborne Collision Avoidance System)
2.26. The DAA system CA functionality can be compared to ACAS in the crewed environment.
2.27. ACAS in CPA provides TA (Traffic Advisory) and RA (Resolution Advisory). Upon receiving a TA, pilots use all available information to prepare for appropriate action if an RA occurs including sighting or assessing a flight path change. (Airservices Australia AIP GEN 7.1 2023)
2.28. In the event of an RA, pilots must immediately conform to the RA indication. This is carried out even if it is contrary to ATC instruction unless doing so would jeopardise safety of the aircraft. Equipped aircraft conduct RA with vertical manoeuvres (climb or descent).
2.29. In the RPAS environment a RWC alert is a tactical separation function and will occur much earlier than a TA. It will show or alert certain areas to be avoided in order to remain well clear. The DAA CA capability provides specific resolution manoeuvres to avoid a hazard with manual or automated execution. [ICAO Manual on RPAS 2015]
2.30. In addition, a RP is subject to potential latency and lag issues relating the delay from the time of receiving the hazard alert to the time to react and then conduct the manoeuvre. The draft second edition of the RPAS manual discusses that manual (human in the loop) CA actions will need rigorous safety assessment to ensure the required manoeuvres are completed in a timely manner to avoid collision.
2.31. The ICAO Manual on RPAS highlights that during an encounter between an ACAS-equipped aircraft and an RPA with DAA capability for the conflicting traffic, the two aircraft must implicitly or explicitly coordinate resolution advisories that will not conflict.
ATC actions in the event of a CA manoeuvre
2.32. Controller actions regarding CA manoeuvres for RPA should be in line with ACAS procedures as per IFATCA TPM policy AAS 1.1 AIRBORNE COLLISION AVOIDANCE SYSTEMS (ACAS) that states:
| Once an aircraft departs from its ATC clearance or instruction in compliance with an RA, or a pilot reports an RA, the controller ceases to be responsible for providing separation between that aircraft and any other aircraft affected as a direct consequence of the manoeuvre induced by the RA. |
ICAO DOC 4444 (PANS-ATM) contains the pilot and controller procedures required to be followed in the event of a RA:
When a pilot reports a manoeuvre induced by an ACAS RA, the controller shall not attempt to modify the aircraft flight path until the pilot reports returning “Clear of Conflict”.
Once an aircraft departs from its ATC clearance or instruction in compliance with an RA, or a pilot reports an RA, the controller ceases to be responsible for providing separation between that aircraft and any other aircraft affected as a direct consequence of the manoeuvre induced by the RA. The controller shall resume responsibility for providing separation for all the affected aircraft when:
a) the controller acknowledges a report from the flight crew that the aircraft has resumed the current clearance; or
b) the controller acknowledges a report from the flight crew that the aircraft is resuming the current clearance and issues an alternative clearance which is acknowledged by the flight crew.
2.33. When a RPA must conduct CA manoeuvre, the ATCO should cease to be responsible for providing separation until the RPA is able to return to the terms of the ATC instruction or clearance once the conflict is resolved as per ACAS procedures and IFATCA policy.
2.34. The existing ACAS TPM policy AAS 1.1 is sufficient to cover RPAS DAA CA manoeuvres.
Command and Control (C2) Link.
2.35. C2 stands for the two C’s – Command and Control and refers to the data link between the remotely piloted aircraft (RPA) and the remote pilot station (RPS) for the purposes of managing the flight which is defined in ICAO Doc 10019.
2.36. The C2 data link connects the Remote Pilot Station (RPS) and the Remotely Piloted Aircraft (RPA). ICAO DOC 10019 describes that the link may be simplex or duplex and may be in direct radio line-of-sight (RLOS) or beyond radio line-of-sight (BRLOS). as described in a) and b).
a) RLOS: refers to the situation in which the transmitter(s) and receiver(s) are within mutual radio link coverage and thus able to communicate directly or through a ground network provided that the remote transmitter has RLOS to the RPA and transmissions are completed in a comparable timeframe; and
b) BRLOS: refers to any configuration in which the transmitters and receivers are not in RLOS. BRLOS thus includes all satellite systems and possibly any system where an RPS communicates with one or more ground stations via a terrestrial network which cannot complete transmissions in a timeframe comparable to that of an RLOS system.
2.37. ICAO DOC 10019 states:
“The distinction between RLOS and BRLOS mainly concerns whether any part of the communications link introduces appreciable or variable delay into the communications, than the architecture of the link.”
2.38. At this point, an ATCO would not probably know if a RPAS is using RLOS or BRLOS. It may be a fair point that he is not even aware of the concept all together. There is yet to be determined the extent of information about the C2 link an ATCO has to receive in order to provide air traffic services to the respective RPAS.
C2 link latency issues
2.39. When it comes to the C2 data link, the latency or reaction time of the actions taken by the RPS should be similar to the one taken by a PIC. The RPA should respond and execute any command in a similar way a manned aircraft does. If the C2 link takes a considerably longer time for the RPS to manoeuvre the RPA, this could affect the normal behaviour of the ATCO, because they have to take into consideration the delay in actions when transmitting instructions to an RPAS compared to a manned aircraft.
2.40. These differences in actions and their timing between manned aircraft and RPAS has to be the subject of training, so that ATCOs will be as accustomed with the operation of the RPAS as he/she is with the conventional aircraft.
Lost C2 link and contingency procedures
2.41. Loss of C2 link should not be equated with the failure of voice communications with ATC. Lost C2 link defined by ICAO in RPAS Concept of Operations:
“is the loss of command and control link contact with the remotely-piloted aircraft such that the remote pilot can no longer manage the aircraft’s flight.”
2.42. ICAO Doc 10019 discusses five contingency options that are to be considered by the RPAS operators during lost link situations:
- continue the original flight plan;
- land at the nearest appropriate designated landing site;
- direct return to departure site;
- flight termination;
- climb to altitude to attempt to regain C2 link.
2.43. If a communication loss has also occurred, an ATCO will have difficulty knowing which of the above listed procedures the RPAS will execute, unless it is documented in the flight plan or a pre-determined and agreed procedure. When code A7400 is used it does not provide enough information to the ATCO about the nature and severity of the lost link.
2.44. Once ATC is aware of the situation, ATCO workload will increase as there will be a need to clear the flight path of a RPA contingency action to limit the risk to other traffic and a potential collision event.
2.45. In any other contingency situation regarding manned aircraft, the ATCO has aimed training that enables him to practice and learn how to react in each given situation. For example, ATCOs have abnormal and emergency situations training where they learn how to react when faced with an engine loss, fire in the cabin etc. It should be taken in consideration that the training of abnormal situations should include the RPAS scenarios as well.
CA actions during lost C2 Link contingency
2.46. If a collision threat occurs during a period of degraded or C2 lost link. The ATCO could be relying on RPAS with DAA systems with integrated ACAS (CA capability) to conduct automated CA manoeuvres to solve the conflict.
2.47. In the event of an automated CA manoeuvre being carried out, the ATCO should have the same responsibility and liability as when ACAS RA occurs as defined by ICAO and the IFATCA TPM policy as stated above. The difficulty lies in being able to continue to maintain separation once the traffic is clear of conflict if it remains in a degraded data link situation.
RPAS – ATCO two way communication
2.48. CAO Doc 10019 states that:
“The general requirements for ATC communications, to and from the remote pilot, are the same as for manned aviation operating in the same airspace. In addition to very high frequency (VHF) voice, this may also include the requirement to support ATC data link.”
2.49. There are two main ways for the communications between the RPS and ATC:
- via the RPA;
- via a new broadcast communication link directly between the ATCO and RPS.
2.50. Communications via the RPA do not require additional equipment for the ATC units, but imply that the RPA has a VHF radio installed on board and can relay the voice data to the RPS via C2 link.
2.51. When an architecture that uses the RPA as a relay between the ATC and the RPS is in RLOS, the RPA will receive the voice message directly, but in BRLOS, a satellite is required to link the VHF antenna to the RPA.
2.52. If the architecture chosen is that of a direct line between ATCO and RPS, specific equipment installation is required in the ATC units. On top of this, all voice messages from the ATC and RPS should be broadcasted on the sector frequency, so that all the aircraft in that sector can hear and be aware of those messages.
2.53. It is clear that the RPAS has to comply with Required Communication Performance (RCP) values for the airspace it will fly in.
Communication latency issues
2.54. The draft RPAS manual proposes that RPA response times to control instructions issued by ATC may be longer than those compared to crewed aircraft.
2.55. From the ATCO point of view, the problem is with the amount of delay or latency. An ATCO has to accommodate the delay in actions compared to a manned aircraft. These delays in RP ATC communications can have a direct effect on ATC workload management performance and may increase the probability of errors. This was highlighted by Rantanen et al (2002) in a study about ATC communication delays that suggests there is a significant impact on controllers’ performance and workload when there is a delay in the pilot controller communication loop.
2.56. Communication delays on busy VHF frequencies in high-density airspace may lead to confusion, over transmissions and disturbing the flow of communications. Subsequently it will lead to increased transmissions to confirm readbacks and ensure instructions and clearances are being received, understood and followed.
2.57. ATCOs have adjusted to the latency that currently exists with ordinary ATC – CPA communications. When it comes to RPAS communications, the potential latency will reduce the time an ATC has to react and solve a conflict. If we look at a potential conflict event there is an “amount of time” before loss of separation occurs. As an example, let’s say if the additional latency of RPA response is 7 seconds; those 7 seconds will be subtracted from the available time required for the controller to assess and act and solve the conflict. That makes the solving of the conflict 7 seconds later than it would have been with a manned aircraft.
Conclusions
3.1. RPAS CA systems should seamlessly be able to integrate with the current ACAS systems. The current ICAO ruleset and IFATCA policy relating to the actions and liability of the ATC during a CA event are also valid for RPAS operations.
3.2. Training of ATCO on RPAS operations should include pilot and controller actions and responsibilities relating to DAA and C2 link. It should be comprehensive enough to provide the ATCO the required background knowledge of the systems and their operations.
Recommendations
4.1. It is recommended that the following be accepted as policy and inserted into the TPM:
| IFATCA TPM (2024), TRNG 9.2.7 RPAS training |
Prior to the integration of RPAS, comprehensive Detect and Avoid (DAA) training shall be provided to ATCOs, which shall include:
Prior to the integration of RPAS, comprehensive C2 Link training shall be provided to ATCOs, which shall include:
|
References
Australia Aeronautical Information Publication (AIP) Book – Airservices Australia (2023)
ICAO RPAS CONOPS (202x)
Remotely Piloted Aircraft System (RPAS) Concept of Operations (CONOPS) for International IFR operations
Retrieved from
https://www.icao.int/safety/UA/Documents/ICAO%20RPAS%20CONOPS.pdf
ICAO DOC 10019 Manual on Remotely Piloted Aircraft systems (2015)
ICAO DOC 444 (PANS-ATM), Sixteenth Edition (2016)
ICAO DOC 9854 Global Air Traffic Management Operational Concept (2005)
ICAO UTM framework – Edition 3 (2019)
Unmanned Aircraft Systems Traffic Management (UTM) – A Common Framework with Core Principles for Global Harmonization
ICAO Model UAS regulations part 102
retrieved from
https://www.icao.int/safety/UA/Pages/ICAO-Model-UAS-Regulations.aspx
IFATCA (2023) Position on Unmanned Traffic Management (UTM) Systems
(Press Release)
Retrieved from
https://www.ifatca.org/wp-content/uploads/ifatca_pr_utm_101220.pdf
IFATCA TPM (Version 66 2023)
AAS 1.1 AIRBORNE COLLISION AVOIDANCE SYSTEMS (ACAS)
AAS 1.10 OPERATIONAL USE OF UNMANNED AIRCRAFT (UA)
AAS 1.21 UNMANNED AIRCRAFT SYSTEM (UAS) TRAFFIC MANAGEMENT (UTM)
AAS 1.22 RPAS ASSUMPTIONS
ACAS Regulations and Procedure
retrieved from
https://skybrary.aero/articles/acas-regulation-and-procedures
SESAR(2023) # PJ.13-W2-117 /RELEASE 10
IFR RPAS integration in Airspace Class A to C
Retrieved from
https://www.sesarju.eu/sesar-solutions/ifr-rpas-integration-airspace-class-c
James Harvey, NoFlyDrones.co.uk, Open vs Specific vs Certified
retrieved from
https://www.noflydrones.co.uk/eu-drone-regulations-blog/2020/5/26/open-vs-specified-vs-certified
Digital Platform for Unmanned Aviation (DIPUL) 2023
Differentiation of the Operating Categories of Drones
retrieved from
Functional Allocation Approach for Separation Assurance for Remotely Piloted Aircraft 2022
Gano Broto Chatterji, Vishwanath Bulusu, Husni R. Idris and Jordan Sakakeeny
retrieved from
FAA-NASA UTM Research Transition Team: Sense and Avoid Working Group
UAS Traffic Management Conflict Management Model
retrieved from
MALE RPAS Integration into European Airspace: Real-Time Simulation Analysis of Operations with Detect and Avoid 2023
Emmanuel Sunil , Timothy Bleakley, Erik Theunissen, Erik-Jan Hartlieb, Paul Kuiper, Marieke Suijkerbuijk, Jan Karssies, Tim Dufourmont and Jacomijn van Ham
retrieved from
Impact of communication delays on Air Traffic Controllers Vectoring Performance 2002
Esa M. Rantanen, Jason S. McCarley, and Xidong Xu
retrieved from
Unmanned Aircraft Collision Detection and Avoidance for Dealing with Multiple Hazards
retrieved from

