
DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
62ND ANNUAL CONFERENCE, Montego Bay, Jamaica, 8-12 May 2023WP No. 163Remotely Piloted Aircraft System – IFATCA AssumptionsPresented by PLC, TOC & RPATF |
Summary
RPAS operations in non-segregated civil airspace are becoming even more frequent. ICAO is continuously working on amending SARPS and creating new manuals to regulate international IFR operations of RPAS with a target date of November 26, 2026.
IFATCA has only few policy statements on the subject and due to the peculiar characteristics of the RPAS, there is the need to develop more detailed positions to support IFATCA representer in discussing such topics. This paper is a joint effort between the IFATCA RPA-TF, that has provided inputs to the discussion as well as the technical material, and IFATCA TOC and PLC that have assessed the proposed items.
This working paper will describe the essential constituent parts of an RPAS and their possible impact on ATM. In particular, the focus will be on C2 Link and related procedures and on the Detect and Avoid (DAA) system.
Introduction
1.1. Remotely piloted aircraft (RPA) is a subset of Unmanned Aircraft that are fully certificated in accordance with aviation standards. A Remotely Piloted Aircraft System (RPAS) is comprised of a remotely piloted aircraft (RPA), one or more associated remote pilot station(s) (RPS), the required C2 Link (the connection between the RPA and RPS) and any other components as specified in the type design.
1.2. As per manned aviation, RPAS undergo a certification and licencing process for all its components (Operator, RPA, RPS, C2 Link, Remote Pilot). The entire system has to respect international standards in terms of airworthiness/continuous airworthiness, maintenance and personnel licencing. For these reasons, ICAO is amending SARPS and PANS, and developing new manuals and materials to comprise RPAS with a target date of November 26, 2026.
1.3. Aligned with the ICAO RPAS Panel scope, this paper will only consider civil international IFR RPAS operations. The first part of the paper is dedicated to describing the main elements of an RPAS as per the last international developments. The second part will provide ATM-specific considerations on the items described in the first part.
1.4. IFATCA has general policy statements on UAS (IFATCA TPM AAS 1.10). The policy is generic enough to support general considerations but, since the concept has evolved and more details on the subject are available, a revision of such policy is necessary. The aim is to expand and detail its content considering the potential impact on ATM of new operational, technical, and regulatory developments of RPAS.
1.5. This paper is a joint effort between the IFATCA RPA-TF, which has provided inputs to the discussion as well as the technical material, and IFATCA TOC and PLC which have assessed the proposed items.
Discussion
2.1. Definition
2.1.1. RPAS and related elements have developed several new specific terms and acronyms. The list below is extracted from ICAO Annex X, Volume VI “Communication Systems and Procedures Relating to Remotely Piloted Aircraft Systems C2 Link”, First Edition, July 2021.
C2 Link. The data link between the remotely piloted aircraft and the remote pilot station for the purposes of managing the flight.
C2 Link communication service provider (C2CSP). An entity which provides a portion of, or all of, the C2 Link service for the operation of an RPAS.
Note. — An RPAS operator may also be its own C2CSP.
C2 Link coverage area. The area in which the C2 Link service can be received including the area where the QoSD does not meet the QoSR.
C2 Link interruption. Any temporary situation where the C2 Link is unavailable, discontinuous, introduces too much delay, or has inadequate integrity; but where the lost C2 Link decision time has not been exceeded.
C2 Link service. A communication service providing the C2 Link.
C2 Link service area. The area within the C2 Link coverage area where the C2 Link QoSD meets the QoSR.
C2 Link specification. The minimum performance to be achieved by the C2 Link equipment in conformity with the applicable airworthiness system design requirements.
Handover. The act of passing piloting control from one remote pilot station to another.
Lost C2 Link decision state. The state of the RPAS in which a C2 Link interruption has occurred, but the duration of which does not exceed the lost C2 Link decision time.
Lost C2 Link decision time. The maximum length of time permitted before declaring a lost C2 Link state during which the C2 Link performance is not sufficient to allow the remote pilot to actively manage the flight in a safe and timely manner appropriate to the airspace and operational conditions.
Lost C2 Link state. The state of the RPAS in which the C2 Link performance has degraded, as a result of a C2 Link interruption that is longer than the lost C2 Link decision time, to a point where it is not sufficient to allow the remote pilot to actively manage the flight in a safe and timely manner.
Nominal C2 Link state. The state of the RPAS when the C2 Link performance is sufficient to allow the remote pilot to actively manage the flight of the RPA in a safe and timely manner appropriate to the airspace and operational conditions.
Quality of service (QoS). The totality of the characteristics of an entity that bear on its ability to satisfy stated and implied needs.
Quality of service delivered (QoSD). A statement of the QoS achieved or delivered to the RPAS operator by the C2CSP.
Quality of service experienced (QoSE). A statement expressing the QoS that the remote pilot believes they have experienced.
Quality of service required (QoSR). A statement of the QoS requirements of the RPAS operator to the C2CSP.
Note.— The QoSR may be expressed in descriptive terms (criteria) listed in the order of priority, with preferred performance value for each criterion. The C2CSP then translates these into parameters and metrics pertinent to the service.
Remote pilot station (RPS). The component of the remotely piloted aircraft system containing the equipment used to pilot the remotely piloted aircraft.
Remotely piloted aircraft (RPA). An unmanned aircraft which is piloted from a remote pilot station.
Remotely piloted aircraft system (RPAS). A remotely piloted aircraft, its associated remote pilot station(s), the required C2 Link(s) and any other component as specified in the type design.
Service level agreement (SLA). The agreement between the C2CSP and the RPAS operator covering the safety, performance, service area and security of the C2 Link provision as required for the RPAS operator’s intended operations.
Switchover. The act of transferring the active data link path between the RPS and the RPA from one of the links or networks that constitutes the C2 Link to another link or network that constitutes the C2 Link.
2.2. RPAS: general considerations
2.2.1. An RPAS is comprised of an RPA, its associated RPS(s), a C2 Link and any other components as specified in the type design.
2.2.2. An RPAS operator is an entity that is conducting flight operations using RPAS and it is always responsible for the safety of the operations. In cases where it does not own all the RPAS components, the operator will rely on third parties for the provision of the missing components.
2.2.3. An example where external support can be necessary is for long-endurance and range missions. In fact, some RPAS have characteristics that allow several hours or days of uninterrupted flight. As a result, an RPA flight could involve more than one remote flight crew, piloting from more than one RPS (possibly in multiple locations) and relying on more than one C2 Link Service Provider (C2CSP) to support the C2 Link.
2.2.4. Due to its distributed nature, RPAS needs to have a connection to transmit the required Aviate, Navigate, Communicate and Surveillance/Integration information between the two physical parts of the RPAS (RPA and RPS). This data link is the C2 Link and it can be used also to support ATC communications.
2.2.5. The C2 Link connects the RPA to the RPS where a remote pilot controls the RPAS. Again, for long endurance flights the coverage of a single C2CSP, being it the operator or a different provider, might not be sufficient or the endurance will exceed the maximum duty time of the remote pilot. For these reasons, the C2 Link can be switched from one C2CSP to another or the remote pilot can perform the handover of the control of the RPA from one RPS to another RPS.
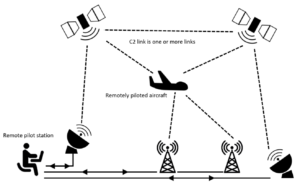
Figure 1 — The C2 Link connects the RPA and the RPS via one or more datalinks
2.2.6. Considering the fact that pilot is not on board the aircraft, RPAS needs systems that can replace pilot’s functions in terms of identifying hazards and avoiding collisions. The Global Air Traffic Management Operational Concept (Doc 9854) identifies the need to limit the risk of collision to an acceptable level between an aircraft and the following hazards: other aircraft; terrain; weather; wake turbulence; incompatible airspace activity; and when the aircraft is on the ground, surface vehicles and other obstructions on the apron and manoeuvring area. The Detect And Avoid system (DAA) is the system responsible to support this function.
2.3. C2 LINK
2.3.1. General description
2.3.1.1. The C2 Link is the logical connection, however, realized, used for the exchange of information between the RPS and the RPA, to enable the remote pilot to safely integrate the RPAS into the global aviation operational environment, including with respect to communication, navigation, and surveillance.
2.3.1.2. This logical connection concept supports many different potential communication architectures and technical solutions, which are all capable of adequately carrying the information between the RPA and the RPS. It is important to underline that there is only one active C2 Link, but it can be composed of several different data links which operate independently or simultaneously to enable the C2 Link to perform its function and meet its specification.
2.3.1.3. The main approach that has been developed to ensure that the C2 Link can effectively support the operations is the concept of Required Link Performance (RLP). The RLP represents the performance (in terms of Continuity, Availability, Integrity, Latency and Expiration Time) (RTCA DO-377A Minimum Aviation System Performance Standards for C2 Link Systems Supporting Operations of UAS In U.S. Airspace) that the C2 Link shall reach to ensure safety levels are met according to the activity the remote pilot is performing, the airspace in which the RPA is operating and the phase of flight in which the RPA is operating. For these reasons, RLPs are set by the State Competent Authority.
2.3.1.4. The RPAS Operator is responsible to respect RPLs according to the planned operations. From RPLs, it derives the Quality of Service Required (QoSR) for the operation. The QoSR (with additional safety margins) constitutes the basis for a Service Level Agreement (SLA) contract between the RP AS operator and the C2CSP . The SLA details the relationship and responsibilities between the operator and the C2CSP.
2.3.1.5. The C2CSP is identified as the entity responsible for the provision and performance of the C2 Link. The C2CSP evaluate such performance via the Quality of Service Delivered (QoSD) which has to respect the SLA to ensure RLPs are achieved at any time.
2.3.1.6. On the other hand, the RPAS Operator receive a service the quality of which can be evaluated via the Quality of Service Experienced (QoSE). Since the RPAS Operator is responsible to ensure the safety of the operations, it has to verify the QoSE against the QoSR: if the QoSE is not sufficient, it is RPAS Operator’s responsibility to adopt appropriate measures and procedures to ensure the safety levels are respected/restored (for example to switchover to another C2CSP).
2.3.1.7. The following picture has been developed to explain the interdependencies and responsibilities of each stakeholder involved in the planning and execution of RPAS operations (The picture has been developed by the ICAO RPASP WG2 “C2 link” to be incorporated in the future ICAO Doc XXXX, Manual on C2 Links for RPAS. It is based on initial considerations reported in RTCA, DO-377A, Minimum Aviation System Performance Standards for C2 Link Systems Supporting Operations of UAS In U.S. Airspace).

Figure 2 — Architectural description of the C2 Link performances
2.3.1.8. Annex 6 Part IV reports the provision of the C2 Link as a safety-critical service. For this reason, all performances, responsibilities, and procedures related to the C2 Link must be clearly stated. From an ATM perspective, this aspect is even more relevant since the C2 Link may also support ATC communication (communications are relayed via the RPA). In this case, inadequate C2 Link performance can lead to a situation where the remote pilot is both unable to control the aircraft and unable to communicate the malfunctioning to the ATC. A very serious situation considering there is no pilot on board to mitigate possible hazards.
2.3.2. Lost C2 Link procedure
2.3.2.1. The C2 Link is used from the remote pilot to control the RPA. If the link is not available or it doesn’t ensure the prescribed performances, such ability is reduced or null. The RPA can be considered flying in automatic mode and it is important to have predictability on the RPA behaviours in such a state. Will it continue to a destination? Will it divert to another aerodrome? If the RPA has been vectored, will it rejoin the original route (and where) or will it continue on the heading? To ensure a common understanding of the C2 Link performance and to have unanimous expectations on RPA behaviours, ICAO has identified three C2 Link states: nominal state, C2 Link decision state and Lost C2 Link state.
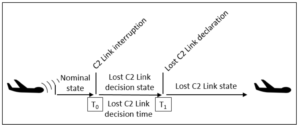
Figure 3 — C2 Link states
2.3.2.2. To standardise the ATM approach to the lost C2 Link, ICAO considers this event a contingency. For this reason, a standardised procedure is under development, and it will be included in future amendments of DOC 4444 PANS-ATM. An example of such procedures is visualised in the following picture.
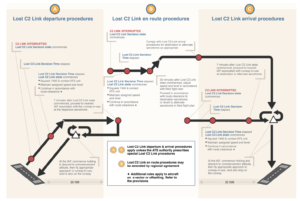
Figure 4 — Possible Lost C2 Link procedure
2.3.2.3. ICAO Annex 6 Part IV reports that where surveillance is in use, a special purpose SSR code of 7400 is used to notify ATS the RPAS has entered the lost C2 Link state and the RPA is following the applicable lost C2 Link procedures.
2.3.2.4. The standard procedure has a general approach to the contingency. If deemed necessary, special Lost C2 Link procedures can be developed for specific locations considering the type and volume of traffic, ATS service provided and any other aspect that can affect the applicability of the general procedure. These procedures are expected to be published in the State aeronautical information publication (AIP) to ensure a single point of reference for RPAS operators.
2.4. DAA Detect and Avoid
2.4.1. RPA may encounter many types of hazards and, since the pilot is not on board the aircraft, it is theoretically unable to mitigate and control such hazards. The ICAO Global Air Traffic Management Operational Concept (Doc 9854) identifies the need to limit the risk of collision to an acceptable level between an aircraft and the following hazards: other aircraft, terrain, weather, wake turbulence, incompatible airspace activity, and when the aircraft is on the ground, surface vehicles and other obstructions on the apron and manoeuvring area.
2.4.2. ICAO DOC 9854 also describes conflict management as a three layers concept: strategic conflict management (through airspace organization and management, demand and capacity balancing, and traffic synchronization), separation provision, and collision avoidance (DOC 9854 Global ATM Operational Concept (GATMOC), First Edition, 2005: 2.1.7 Conflict Management).
2.4.3. Detect And Avoid (DAA) (DOC 9854 Global ATM Operational Concept (GATMOC), First Edition, 2005: 2.1.7 Conflict Management) capability aims to ensure the safe execution of an RPA flight and to enable full integration in all airspace classes with all airspace users. By definition, a DAA system shall provide two functions: the Collision Avoidance (CA) function and the Remain-Well-Clear function (RWC).
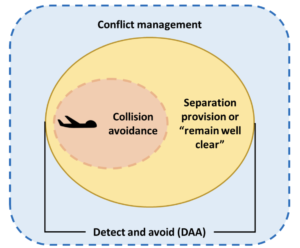
Figure 5 — Conflict management layers as describe in ICAO DOC 9854
2.4.4. The RWC enables the remote pilot to comply with the responsibilities for ‘good airmanship’ and the right of way rules of Annex 2. In particular, by timely alerting the pilot of possible encounters with other traffic and giving the remote pilot guidance to apply the right of way and to remain well clear of these. When separation is not provided by ATC, the RWC function provides the separation layer of conflict management.
2.4.5. For these reasons, the new Annex 6 Part 4 requires the RPA to be equipped with an automated system that performs appropriate collision avoidance manoeuvres, except where the collision avoidance responsibilities of the remote pilot can be adequately exercised otherwise. This system is essential in case of a Lost C2 Link state where the RPA flies autonomously.
2.4.6. Similarly to C2CSP, discussions are ongoing to allow the possibility to consider the DAA as a service. A DAA provider will collect and elaborate all information received and will perform the DAA functions. This means that the technical equipment that detects hazards might not physically be on board the RPA, especially during approach and departure where the surveillance coverage is granted.
2.5. IFATCA considerations
2.5.1. RPAS are complex systems and civil RPAS operations are not globally in place yet. So, information on RPAS operational reliability comes principally from military sources. In general, military operations and standards might widely defer from civil ones, causing a general lack of applicability and predictability to civil RPAS behaviours in civil environments.
2.5.2. Industries and several other international bodies are working on developing all necessary procedures to integrate civil RPAS operations with conventional aviation. IFATCA is contributing to the development of such procedures actively participating in the ICAO RPAS Panel and in several international study groups and projects. There is a symbolic date set by ICAO to complete all the works, 26th November 2026: the applicability date of all amendments to SARPS and manuals related to RPAS.
2.5.3. As described in the paragraphs above, C2 Link and DAA are two very sensitive topics also for ATM. Below are a series of considerations from the operational point of view that has been used by IFATCA TOC and PLC to derive proposals for new policy statements.
2.5.4. C2 Link interruptions
2.5.4.1. At the international level, the operational perspective for the C2 Link is that C2 Link might be composed of several data links. The Lost C2 Link state is considered an undesirable condition but, it is also true that there are procedures that have an intrinsic capability to create C2 Link interruptions. An example of such procedures is the handover between RPS or the switchover between C2CSP (For definitions, see paragraph 2.1.1). Since it is foreseen that there is only one active link at a time, transferring the control from an RPS to another one or connecting the same RPS to a different C2CSP inevitably creates interruptions.
2.5.4.2. During the ICAO discussion, IFATCA asked about the possibility to have multiple C2 Link working in parallel to avoid (at least) C2 Link interruption caused by handover/switchover. This option has been deemed unrealistic by industries participating in the discussion due to the cost connected to duplicating both hardware and software of the system. Eventually, it has been achieved that possible C2 Link interruptions have to be evaluated by States in the process of establishing RLP. So far, data from real operations are not available and IFATCA will continue monitoring the evolution of the concept.
2.5.4.3. As per the definition, during a C2 Link interruption, the RPS and the RPA are not fully connected. It means that the remote pilot control over the RPA is degraded and, in the case where C2 Link is used also to support ATC communications, such communications link might be interrupted. Thus, a C2 Link Interruption can result in an automatic flight with no ATC communications.
2.5.4.4. TOC and PLC have discussed the possible impact of C2 Link interruptions caused by handover and switchover. Since those interruptions are considered in developing safety parameters for the airspace (RLP), it is TOC and PLC’s opinion that ATC has not to be notified by the remote pilot about handover and switchover.
2.5.5. C2 Link decision State
2.5.5.1. Among states reported in 2.3.2.6, the Lost C2 Link decision state is the most ambiguous and potentially problematical state. This is the interval, after a C2 Link interruption, where the C2 Link is not degraded to a point where the Lost C2 Link must be declared but, on the other side, the remote pilot is not in full control of the operations. The lost C2 Link decision time might vary according to the phase of flight and the airspace classification. According to standards available for US airspaces, it goes from fractions of seconds (departure/arrivals in controlled airspace) to minutes (flight into oceanic controlled airspace).
2.5.5.2. Practical results of this status on ATM are again related to both behaviours of the RPA in terms of manoeuvres and in terms of ATC communications. These aspects can be described as an RPA not promptly executing instructions acknowledged by the remote pilot or a remote pilot replying with unexpected and not precise answers such as “say again”, “unable” or “standby” or not replying at all because the communication is not active. For sure, this state of uncertainty has an impact on ATC.
2.5.5.3. Procedures developed so far do not foresee any kind of advice to ATC about C2 Link Interruption. Squawk 7400, as well as the use by the remote pilot of alternative means of communication (telephone for example), are only required when the status change to the Lost C2 Link state and the appropriate contingency procedure is initiated.
2.5.5.4. TOC and PLC, in assessing implications of the C2 Link decision state, have considered several aspects: duration of the interruption (seconds to minutes), comparison with manned aviation (how the ATCO/FISO react to manned traffic not acknowledging immediately to an instruction), possible new phraseology to be implemented, frequency congestion, workload. It is TOC and PLC’s opinion that the RPAS Operator or the Remote Pilot shall notify ATC only that the RPAS has entered the Lost C2 Link state or that the nominal state has been re-established after a C2 Link Lost. Once RPAS operations will become more common, a new evaluation of the implications of the C2 Link decision state will be made considering new data available.
2.5.6. Lost C2 Link state
2.5.6.1. In the lost C2 Link state, the RPA is flying automatically according to the lost C2 Link procedure’s parameters (continue to destination or diversion, routes, levels, …). Such parameters are part of the authorisation request that the RPAS operator shall submit to all States the RPA will operate into6. It is also expected that such a procedure is communicated to the relevant ATS units via the flight plan (FF-ICE) or other means.
2.5.6.2. It is TOC and PLC’s opinion that ATCOs shall have timely access to the applicable RPAS lost C2 Link procedure’s details and that ATS units shall be notified of any variation in the applicable Lost C2 Link procedures.
2.5.6.3. Since the remote pilot and the RPAS operator are on the ground, other means of communication may be used by them to establish a connection with the appropriate ATC unit during the Lost C2 Link state. Alternative means of communication may include, among others, mobile/cell phones, landlines, satellite phones, or terrestrial data communication.
2.5.6.4. TOC and PLC have considered the implications of integrating different means of communication (radio and telephone) on the same CWP and it can be not always achievable. In such conditions, direct communication between the Remote Pilot/RPAS operator and the ATC position might be demanding in terms of workload for controllers as well as affecting the effectiveness of the 4 Eye Principles (4EP). So, it is recommended that communications between the remote pilot/RPAS operator and the ATC unit during a C2 Link Lost should be managed by a third party (for example supervisor position) coordinating actions with the sector/position concerned. Notwithstanding that, due to non-uniform technical capabilities, a variety of possible ATC unit configurations, and a general lack of experience with either real or simulated situations, this recommendation will not be proposed as a new policy statement.
2.5.6.5. A lost C2 link is considered a contingency. To ensure a timely and effective response from ATS, specific training on the implications of the lost C2 Link is necessary. It is important to highlight that an RPA in the lost C2 Link state will follow pre-programmed manoeuvres and that there is no capability for the remote pilot to act on the flight path of the RPA. The training item is already considered in IFATCA policy AAS 1.10 OPERATIONAL USE OF UNMANNED AIRCRAFT (IFATCA Technical and Professional Manual, Version 65.0, July 2022), and consequently, no other actions are considered necessary.
2.5.7. Required Link Performance
2.5.7.1. The concept and procedures related to RLP are still under development. So far, the main elements to the discussion have been provided by RTCA DO-377A “Minimum Aviation System Performance Standards for C2 Link Systems Supporting Operations of Unmanned Aircraft Systems in U.S. Airspace”.
2.5.7.2. Despite numerous parameters and technicalities provided by the document, there are some ATM aspects that need to be further investigated to allow RPAS integration at the international level.
2.5.7.3. Similarly to the “W” reported in the equipment field of an ICAO flight plan to indicate RVSM capability, there is an ongoing discussion on how to disseminate information on the C2 Link performance. One idea is to mimic the RVSM mechanism to verify that the RPAS is able to meet the required C2 Link performance considering the position, phase of flight, operation and the airspace it is flying into. This might be necessary for the ATCO to know if the RPAS might be able to accept a vector in a specific direction or if it might be able to follow an unplanned route.
2.5.7.4. According to the information reported in this paper, it is TOC and PLC’s opinion that there are not sufficient elements and procedures to evaluate ATCOs’ responsibility in that respect or to support a specific procedure to be implemented. This aspect has to be further investigated and it will be considered again in future works.
2.5.8. DAA
2.5.8.1. DAA system shall provide two functions: the Collision Avoidance (CA) function and the Remain- Well-Clear function (RWC). The CA function serves the same purpose as the ACAS function defined in Annex 10, Volume IV, Part 1, namely, to allow the remote pilot to avoid a collision after all other mitigations to prevent a collision have failed. The CA function fulfils the Collision Avoidance layer of conflict management (Layer 3). On the other hand, RWC is on layer 2 (Separation Provision Layer) as well as ATC.
2.5.8.2. ATC is in charge of issuing clearances to separate traffic, but the remote pilot has information on possible conflicts through the RWC function of the DAA and might want to manoeuvre to solve that conflict too. So, there might be ambiguity on who owns the role of the separator or on who has to react first in case of a possible conflict. It has to be clearly said that the separator role (Separation Provision Layer) is on the ATC side and that this ambiguity is mainly connected to the events horizon.
2.5.8.3. In fact, if the time horizon (look ahead) of the RWC is long, the remote pilot will be informed of a conflict well in advance and will ask to manoeuvre in accordance. This can create unnecessary frequency usage and workload because the same conflict might have been identified by the ATCO too, but the ATCO has decided to postpone the solution due to more stringent priorities.
2.5.8.4. TOC and PLC agree on the fact that appointing ATC as the separator has two main results: the first one is that the remote pilot cannot manoeuvre to follow RWC notifications without asking and receiving an ATC clearance, ensuring the complete SA of the ATCO. The second result, connected to the first one, is that a unique separator has the ability to better manage traffic in terms of safety and efficiency. However, RPAS can operate under IFR also in airspace classes where a minimum separation between IFR and VFR (known or unknown) is not required (airspace class D or E). In these cases, ATCOs should be aware of the possibility of receiving requests for Traffic Avoidance Advice from the RPAS or about the execution of collision avoidance manoeuvre from the RPAS.
2.5.8.5. Nowadays, there are special occasions where there is the possibility that crewed aircraft can fly without ACAS operatives. This is reported on the flight plan and is known by ATC. Despite the failure of the system, RWC capabilities are ensured because of the pilot on board. As reported in the DAA section of the paper, there is discussion ongoing about the possibility to have the DAA as a service to the RPAS (DAA Provider). This means that the equipment used to detect all hazards might not be physically onboard the RPA. In the case the DAA provider is unable to provide the service, the RPAS (mainly the RPA) itself is unable to perform any of the necessary tasks to detect and avoid such hazards being it controlled or not by the remote pilot. TOC and PLC consider this situation as a serious safety issue, especially without real operational data to learn and mitigate. It is TOC and PLC’s opinion that the RPA shall always be able to perform CA without any external inputs.
2.5.8.6. It is TOC and PLC’s opinion that specific training requirements for ATCOs on DAA are already present in IFATCA policy AAS 1.10 OPERATIONAL USE OF UNMANNED AIRCRAFT (IFATCA Technical and Professional Manual, Version 65.0, July 2022) and no further considerations are necessary on this topic.
2.6. IFATCA policy
2.6.1. As mentioned in the paper, IFATCA Technical and Professional Manual already contain policy statements related to RPAS. These policy statements are under review by TOC which has ensured compatibility with items reported in this WP. To avoid any ambiguity, IFATCA policy AAS 1.10 OPERATIONAL USE OF UNMANNED AIRCRAFT will not be reported in this WP.
Conclusions
3.1. There has been a constant evolution of concepts and technologies related to RPAS since the last IFATCA policy statements development on the topic. Several new pieces of information are now available and the discussion at the international level is progressing at a fast pace. ICAO has set 26th November 2026 as the applicability date of all new SARPS and manuals regarding RPAS. Consequently, the IFATCA Technical and Professional Manual has to be updated in accordance.
3.2. In its collaboration supporting the development of ATM procedures related to RPAS, IFATCA has identified relevant topics that have been described in the paper. DAA and C2 Link are the main areas of concern since they are essential elements for RPAS integration into the ATM system.
3.3. Other elements, such as the possible impact of the RLP concept as well as further implications deriving from a Lost C2 Link state, have been analysed. These elements and related procedures have not been deemed sufficiently mature by TOC and PLC to express a position. Therefore, these items should be assessed again in the future once more materials will be available.
Recommendations
4.1. It is recommended that the following policy statements:
4.1.1. The RPAS Operator or the Remote Pilot shall notify ATC only that the RPAS has entered the Lost C2 Link state or that the nominal state has been re-established after a C2 Link Lost.
4.1.2. ATCOs shall have timely access to the details of the applicable RPAS lost C2 Link procedure.
4.1.3. ATS units shall be notified by the RPAS operator and/or by the remote pilot in command of any
variation in the applicable Lost C2 Link procedures.
4.1.4. In controlled airspace, the remote pilot cannot manoeuvre the RPA in accordance with a Remain Well Clear notification without an ATC clearance.
4.1.5. The RPA shall always be able to perform CA without any external inputs.
Are incorporated in a new AAS 1.XX “RPAS” section of the IFATCA Technical and Professional Manual.
References
ICAO Annex 2 Rules Of The Air, Tenth Edition, July 2005, Appendix 4.
ICAO Annex X, Volume VI “Communication Systems and Procedures Relating to Remotely Piloted Aircraft Systems C2 Link”, First Edition, July 2021.
ICAO DOC 4444 PANS ATM, Sixteenth Edition, 2016.
ICAO DOC 9854 Global ATM Operational Concept (GATMOC), First Edition, 2005.
ICAO State letter 073 “Proposed new Annex 6, Part IV, and consequential amendments to Annexes 1, 2 and 8 related to international remotely piloted aircraft systems (RPAS) operations in controlled airspace/aerodromes arising from the eighteenth meeting of the Remotely Piloted Aircraft Systems Panel (RPASP/18)”, 23 August 2022.
IFATCA Technical and Professional Manual, Version 65.0, July 2022.
RTCA DO-377A Minimum Aviation System Performance Standards for C2 Link Systems Supporting Operations of UAS In U.S. Airspace, 16 September 2021.

