
DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
54TH ANNUAL CONFERENCE, Sofia, Bulgaria, 20-24 April 2015WP No. 87Concept of GNSS-Based AltitudePresented by TOC |
Summary
The use of pressure-based altimeters in to determine aircraft altitude has been universal across the globe for most of aviation history. This paper explores alternatives provided by Global Navigation Satellite System (GNSS) technologies.
Introduction
1.1 Why is this Paper Important?
1.1.1 The IFATCA Technical and Operations Committee (TOC) looks forward into the future of air traffic control (ATC), educates IFATCA and controllers around the globe and helps them prepare for change. When it comes to technologies that are far-reaching and fundamental to ATC, the review process must begin years, perhaps even decades ahead of any likely implementation.
1.1.2 IFATCA is not served by shunning the ideas and research of others, and only raising concerns when plans are well underway. TOC believes IFATCA should make its views known on emerging concepts early on. GNSS-based altitude is one of those concepts.
1.1.3 A recent Polytechnic University of Madrid study states,
“The use of barometric altimetry is to some extent a limiting factor on safety, predictability and efficiency of aircraft operations, and reduces the potential of the trajectory based operations capabilities.”
It involves numerous support systems, workarounds and double-checks, requiring a high level of vigilance and maintenance by operators.
1.1.4 The British pilots association (BALPA) recently published a piece on the potential for GNSS-based altitude to replace barometric.
1.1.5 The 2004 US-EU Agreement on GPS-Galileo led to the establishment of the ARAIM Technical Subgroup (ARAIM SG) on July 1, 2010. The SG aimed to investigate ARAIM (Advanced Receiver Autonomous Integrity Monitoring) and establish whether it could be the basis for a multi-constellation concept to support air navigation worldwide, including the goal of enabling precision approaches at every airport in the world to 200 ft. Such capability could also be applied in the en route phase of flight. The development of vertical precision in GNSS receivers could potentially replace barometric altimeters.
1.1.6 Traffic density above FL 400 will undoubtedly increase in the next decade as drones, commercial spacecraft and higher performance aircraft take to the skies. Barometrically- based altimetry will restrict this growth.
1.2 General Background
1.2.1 In 1928, German inventor Paul Kollsman changed aviation with the invention of the world’s first accurate Barometric Altimeter, the “Kollsman Window”. This technology has been a bedrock element of aviation for 86 years.
1.2.2 Since the invention, aircraft altitude has been universally determined by comparing the air pressure outside the aircraft to a standard model of the atmosphere with a correction based on a local or standard altimeter setting.
1.2.3 Pressure-based altimetry becomes less accurate at higher altitudes because the real atmosphere does not conform to the standard model, including temperature variance and inversions. Separation of airplanes with pressure altitude works because all aircraft use the same reference, air pressure.
1.2.4 Global Navigation Satellite Systems (GNSS) provide the capability for aircraft to measure their altitude using satellite signals and is completely independent of barometric pressure. Today, GPS and GLONASS provide the GNSS constellations used by aviation. In the future, the European Galileo, Chinese BeiDou-2 (COMPASS), the Japanese Quasi-Zenith Satellite System (QZSS), the Indian Regional Navigation Satellite System (IRNSS) and perhaps other constellations may be available to provide improved vertical precision.
1.2.5 The history of air traffic management reveals consistent and persistent movement towards higher precision in operations, from hand signals to radio, fire pots to NDBs, NDBs to VORs, VOR to GNSS, procedural separation to radar, non-precision approaches to ILS, etc. The experience of transitioning to RNAV and RVSM environments taught modern controllers and the aviation community the tremendous value of increasing the precision of lateral and vertical measurement. Fundamentally, increases to air traffic safety and efficiency have relied on increased precision in aircraft navigation and position information.
1.2.6 Developments in new technologies like unmanned aircraft enable aircraft to operate at much higher altitudes than traditional air transport, and may require alternative means for accurate vertical information as the precision of barometric altimetry deteriorates.
1.2.7 TOC has not found any comprehensive treatment of this issue in industry publications. It is the opinion of TOC that whether the concept of GNSS-based altimetry is feasible or not, a thorough and objective analysis of the issues will serve the industry. This document is meant to provide that service.
1.2.8 For a list of definitions please see Appendix 1.
Discussion
2.2 Recent History
2.2.1 The primary source of altitude for aircraft operations is either indicated altitude, or, for RVSM and other high-end aircraft, Corrected Barometric Altitude (CBA).
2.2.2 As shown in Figure 1, air pressure declines with altitude but the change is less at higher altitudes. As a result, the measurement of pressure differences become less accurate with altitude. A publication of the British Airlines Pilots Association recently stated,
“The accuracy of barometric altimetry is of course appalling, depending as it does on assumed average altitude/pressure calibration curves.”
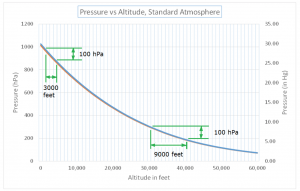
Figure 1: Standard atmospheric pressure lapse
2.2.3 The introduction of Height Measuring Units (HMUs) in the 1990’s enabled the compilation of data showing error rates of aircraft altimeters throughout the world. Figure 2 shows the Altimetry System Error (ASE) for an aircraft and how it changes over time.
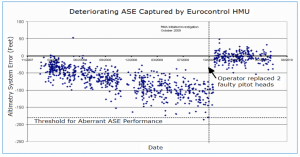
Figure 2: ASE Change vs. Time for One Aircraft
2.2.4 The study of this data led to the identification of error sources in the installation of altimeter systems.
Some examples include:
- Damage to static ports and pitot tubes
- Pressure leaks in pitot/static pipes
- Air Data Computers out of tolerance
- Poor paint finish in static port sensitive areas
- Adequacy of RVSM inspection procedures
- Component life span
- Non-optimised Static Source Error Corrections
- Skin waviness effects
2.2.5 Better understanding of altimetry errors led to the improvement of altimetry systems, particularly for larger, higher performance aircraft. More accurate altimeters led many to consider that the error tolerance built in to the 2000 ft. separation standard was no longer necessary. Precision altimetry, along with more precise auto-pilot systems, enabled RVSM.
2.2.6 ICAO requires the monitoring of height-keeping performance associated with RVSM in Annex 6 as below. The operation and maintenance of HMUs is just a small sample of the infrastructure, expertise and workload required to support barometric altimetry.
7.2.7 The State of the Operator that has issued an RVSM approval to an operator shall establish a requirement which ensures that a minimum of two aeroplanes of each aircraft type grouping of the operator have their height-keeping performance monitored, at least once every two years or within intervals of 1000 flight hours per aeroplane, whichever period is longer. If an operator aircraft type grouping consists of a single aeroplane, monitoring of that aeroplane shall be accomplished within the specified period.
2.2.7 The ICAO Aeronautical Surveillance Panel is moving to harmonize the requirements on altitude reporting in ICAO Doc 9871 to allow the use of ADS-B (i.e. GNSS) data as a viable source of information to replace the use of ground-based HMUs for RVSM height- keeping performance monitoring. This would broaden the role of geometric altitude.
2.3 Baro: Imprecise and Burdensome
2.3.1 Although altimeter settings are part of the foundation of ATC, they represent a major operational burden. Excessive frequency time is used in the verification and issuance of altimeter settings, placing demands on pilots and controllers to validate the system, rather than perform air traffic control functions.
2.3.2 The US Code of Federal Regulations, 14 CFR 23.1325 – Static pressure system, includes the following:
(e) Each static pressure system must be calibrated in flight to determine the system error. The system error, in indicated pressure altitude, at sea-level, with a standard atmosphere, excluding instrument calibration error, may not exceed ±30 feet per 100 knot speed for the appropriate configuration in the speed range between 1.3 VS0 with flaps extended, and 1.8 VS1 with flaps retracted.
2.3.3 ICAO Doc 8168, Aircraft Operations, includes this:
PART II. FLIGHT PROCEDURES
Section 4, APPROACH PROCEDURES WITH VERTICAL GUIDANCE
1.2.6 Blunder errors: Application of an incorrect or out-of-date altimeter setting, either by air traffic control or the pilot is possible and must be prevented by appropriate operational techniques.
2.3.4 Some of the operational burdens of maintaining barometric altimetry systems in the aircraft include:
- Vigilant inspection of static ports by pilots and ground personnel.
- Special procedures for maintenance of aircraft exterior to avoid hazards to static ports such as insects, paint, dirt, etc.
- Critical de-icing equipment for pressure sensing system.
- Continuous need to obtain and enter altimeter settings. A study in the UK found that about 11% of all level busts were associated with incorrect setting of the altimeter.
- Controlled flight into terrain can also result from an altimeter setting error.
- Requirement for ground-based height-measuring units to regularly validate individual aircraft altimeters.
- Vigilance in aircraft design to avoid airflow that distorts pressure reading.
- Supplementation of barometric altimetry for terrain warning systems by radar altimeters, GNSS-based data, etc.
- Requirement for aircraft climb/descent to remain at constant pressure during cruise.
2.3.5 Operational burdens of barometric altimetry on systems outside the aircraft include:
- Technicians and automated equipment (requiring regular maintenance) in thousands of locations around the world measuring altimeter settings every hour and reporting them accurately.
- Controllers and others providing the altimeter settings to pilots, using valuable frequency time and introducing a potential source of serious error.
2.3.6 Other disadvantages of barometric altimetry include:
- Requirement for all users to manage transition altitudes. This issue has been highlighted recently by discussions of harmonizing transition altitudes.
- Loss of available altitudes in the transition area during periods of low pressure.
- Special 2000 ft. separation required above FL 410.
- Poor correlation between pressure-derived altitude and actual height.
2.3.7 Barometric altimeters can and do fail. On June 2, 2010 a PC-12 single-engine aircraft flying IFR was in contact with ACC Bordeaux in France when the altimeter of pilot 1 displayed FL270 and the one of pilot 2 displayed FL290. The controllers tried to obtain independent verification from a military unit but a misunderstanding led them to believe that the indication of FL270 provided by the mode C of the radar was correct. The plane was actually at FL290 thus resulting in a near miss with a much faster A318 in trail of the PC-12. The A318 had to perform an evasive maneuver when the pilot detected the presence of wake turbulence due to the leading traffic.
2.3.8 In 2008 NASA was having difficulty demonstrating RVSM-compliance of the pitot-static system on their T-38N aircraft, used in their astronaut training program, because the monitoring equipment used in typical commercial aircraft did not fit in the two-person cockpit. To address this, Enhanced GPS-based Monitoring Units were strapped to pilots’ legs to collect data and validate the system. This practice will continue in the future to satisfy a long-term monitoring requirement implemented in November 2012.
2.4 Potential benefits of Geometric Altimetry?
2.4.1 The standard 1000 ft. used for vertical separation below FL 410 was convenient from a human factors standpoint. Certainly, it was not practical for pilots to follow a table of altitudes such as 950 ft., 1900 ft. etc., nor was it practical for controllers to assign anything but cardinal altitudes. However, geometric altimetry could offer the ability to redesign the altitude stratification to enable the use of non-cardinal altitudes. Our digital world could enable the formation of an entirely new altitude structure, including for example Flight Levels A1 through Z9, perhaps eliminating syllables from altitude assignments or confusion with other numeric clearance items like speeds and headings.
2.4.2 Consider the changes happening today with lateral routes. While aerial routes have been fixed to ground-based navigational aids for the entire history of ATC, the widespread use of RNAV and GNSS-based navigation in cockpits is eliminating the dependence of lateral routes on navaids. It is freeing airspace designers from the constraints of the past; they are free to draw routes aligned only with airspace management purposes.
2.4.3 The 1000 ft. standard includes significant margins for pressure errors. The allowable ASE for RVSM aircraft is 245 ft. ASE is monitored on an ongoing, spot basis using HME explained previously, but the time lag for results is days or weeks. When errors of 200 ft. or more are observed, ICAO Regional Monitoring Agencies insure the operator is contacted for corrective action. Errors of as much as 800 ft. have been observed due to modifications in airflow around the pitot tubes.
2.4.4 Under today’s standards, the safety buffer provided by the 1,000 foot separation standard allows two aircraft can come within 430 ft. of each other vertically without any violation either by ATC, pilots or maintenance personnel. The standards we use today were derived over 50 years ago, and based on the general accuracy of that era’s manufacturing technologies.
2.4.5 Separation standards are based on statistical probabilities using a collision risk model. For altitude separation, those probabilities are derived based on allowable errors in altimetry, among other things. If vertical precision could be improved dramatically, those separation standards could be reduced and the system could achieve a higher capacity.
2.4.6 Separation standards with terrain could be similarly reduced, providing pilots and controllers with more useable airspace in key areas close to major aerodromes.
2.4.7 Contemporary GNSS systems by themselves do not have the precision necessary to be reliable for altimetry. Many states are building or have built supplementary systems to make the GNSS signal useful for vertical guidance, primarily to be used in the approach phase of flight. These include ground-based augmentation systems (GBAS) and space- based augmentation systems (SBAS). These systems perform secondary checks of the GNSS data and transmit correcting signals. GBAS works at a local level while SBAS covers a region of the globe. TOC has another paper on GBAS in the 2015 work program.
2.4.8 The US SBAS system is called the Wide Area Augmentation System (WAAS) and the European system, the European Geostationary Navigation Overlay Service (EGNOS). The FAA completed a study on WAAS performance in July 2014 and some of the results are shown in Figure 3. They demonstrate that WAAS does provide vertical accuracy on par with lateral accuracy measurements.
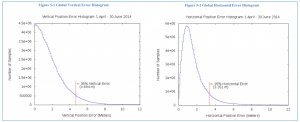
Figure 3: GPS with WAAS Vertical and Horizontal Error Performance, Jan-Jun 2014
2.4.9 With improved vertical precision, probabilistic modeling could reduce vertical separation standards. A reduction would increase the number of useable altitudes, and this would represent both a capacity and efficiency increase. RVSM was a huge and very successful step in reducing vertical separation. At some future point, geometric altimetry could be another. As with RVSM, the increase in assignable altitudes could represent a safety increase in that more altitudes are available for separation.
2.4.10 It is planned that air traffic management (ATM) systems will one day be trajectory-based. A single altitude reference for vertical separation would benefit this system. Geometric altitude will simplify the introduction of these and other advanced concepts yet to be developed.
A 2011 study by the Polytechnic University of Madrid states:
“The use of barometric altimetry […] reduces the potential of the trajectory based operations capabilities. However, geometric altimetry could be used to improve […] these aspects.”
2.4.11 In cold temperatures, with barometric altimeters, ATC is required to make corrections to minimum vectoring altitudes. Similarly, pilots are required to correct flight altitudes for low temperatures when flying on their own navigation. These would no longer be necessary with geometric altitude reference.
2.4.12 The need to allow for varying temperature complicates the design of barometrically based RNAV approaches, causing them to consume more airspace.
2.4.13 The procedures involved with the use of transition altitudes mean that the gap between the lowest usable flight level and the next lower altitude is more than 1000 ft., and can be as much as 2000 ft. This represents wasted system capacity and an operational burden on ATC.
2.4.14 In its summer 2014 edition, the British Airline Pilots Association publication “The Log” stated:
“Barometric sensing is inherently difficult and is only brought to an acceptable standard by extensive maintenance of the aircraft’s surface condition near the static ports, close attention to condensation traps and drains.”
2.4.15 Barometric altimetry involves out-of-tolerance pressure differences between neighbouring sectors. As the UK seeks to increase their transition altitude to 18,000 feet, they have undertaken a significant effort to create procedures to mitigate this issue. It seems likely there will be an operational burden associated with this.
2.4.16 As evidenced by the false RA events cited previously, the use of barometric altimetry with TCAS/ACAS systems can be a potential hazard. If available, precision GNSS-based altitude information could be an effective check to prevent false RAs.
2.4.17 The Enhanced GPS-based Monitoring Unit (EGMU) discussed previously is a commercial product that augments RVSM monitoring equipment and has supported over 10,000 RVSM flights worldwide.
2.5 Current Usage of GNSS for Altitude
2.5.1 In today’s world, there are other ways to measure altitude than sensing molecules of air and using atmospheric pressure. Terrain Awareness and Warnings Systems (TAWS) use GNSS data to supplement altitude measurement.
2.5.2 The Honeywell Enhanced Ground Proximity Warning System (EGPWS) computer was developed in the early 1990’s, and determines a geometric altitude using barometric pressure, GPS altitude, radio altitude, groundspeed, roll angle and position, along with terrain and runway elevation data. It is described as follows in company literature.
An alternate source [to pressure-based altitude] of altitude information is GPS, which provides a Geometric Altitude and is not significantly affected by atmospheric conditions. The overall accuracy of GPS Altitude however, is not typically sufficient to be used directly by the EGPWS, primarily due to errors induced by Selective Availability. However, GPS Altitude can be used in combination with other signals to provide a reliable estimate of its real time accuracy, which then can be used for reasonableness checking of other altitude sources.
Since no single sensor can provide an accurate geometric altitude through all phases of flight and atmospheric conditions, the EGPWS computes an estimated average altitude using Pressure and GPS Altitudes, aircraft position, and the internal runway and terrain databases. This is the Geometric Altitude function.
2.5.3 Most GNSS-based approach and landing systems (LPV via WAAS/SBAS and GLS via GBAS) use some element of geometric altitude, but the pilot never sees it because the guidance is only displayed as deviation from the intended path. Altitude data displayed for pilot reference is always barometric.
2.5.4 The ADS-B Out message set provides barometric altitude directly, but also includes the geometric altitude. In 2012, the ICAO SEA/BOB ADS-B WG recommended ATM systems display geometric altitude when barometric altitude is not present.
2.5.5 The ICAO Separation and Airspace Safety Panel (SASP) strongly encourages work to assess the viability of using Automatic Dependent Surveillance – Broadcast (ADS-B) geometric height data as a means of estimating aircraft height-keeping performance to replace the previously mentioned ground-monitoring units whose range is limited to 40nm.
2.5.6 The paragliding community has been using GNSS-based altitude for competitions. The practice is controversial because the use of GNSS-based altitude to avoid barometrically-based restrictions has led to disqualifications and violations. Still, this community has developed some live experience with GNSS-based altitude.
2.5.7 Google’s Project Loon is a network of balloons in the range of FL 500-600 intended to provide internet access to remote areas and over the oceans. The balloons are equipped with transponders that report geometric altitude. The emergence of these and other very high altitude vehicles – including higher performance aircraft and support vehicles for space travel – point to expanding use of altitudes above FL 410. Because the utility of barometric altimetry fades at these altitudes, vertical separation standards are much greater, and demand could lead to a shortage of airspace above FL 410.
2.6 Current limitations to the Accuracy of GNSS Altitude and Systemic Issues with Geometric Altimetry
2.6.1 The accuracy of GNSS-based altitude depends on the satellite geometry at the time. To get the degree of precision laterally, three satellites are generally needed. The satellite geometry must have both “overhead” satellites as well as those at lower angles. A fourth satellite is needed to provide a time correction which enables the determination of the vertical position.
2.6.2 Receiver autonomous integrity monitoring (RAIM) is a GPS technology in which the aircraft performs self-contained fault detection of satellite data. RAIM compares each satellite measurement to other available satellite measurements to detect the presence of a faulty satellite within those in-view. But RAIM only supports lateral navigation, not vertical. The vertical accuracy of GNSS-based receiver is typically 50% worse than the horizontal accuracy. So a 100m accuracy in the lateral plane would typically correspond to 150m accuracy vertically. In addition, GNSS receivers may not compute a vertical integrity limit on the vertical geometric position.
2.6.3 If the receiver has the benefit of multiple satellite constellations, then the satellite geometry issue could be mitigated. At present, with just the US GPS and Russian GLONASS systems operating, there is not enough coverage to provide the necessary signal integrity.
2.6.4 To get vertical integrity with today’s GPS, a satellite-based augmentation system (SBAS) is required. SBAS is based on networks of reference receivers spread over continental areas. The reference receivers are strategically positioned to collect GPS satellite data across the region to be served. SBAS determines corrections to GPS signals which are then broadcast over the area spanned. The US Wide area augmentation systems (WAAS) is an SBAS.
2.6.5 There are numerous other issues associated with the roundness of the Earth, and these are discussed in Appendix 2.
2.6.6 In oceanic areas, there is a lack of ground reference receivers used to correct or confirm the GNSS signal accuracy. GNSS vertical accuracy is degraded and this could threaten the use of geometric altitude for this purpose.
2.6.7 Space weather and ionospheric disturbances are major issues if not monitored and corrected. From an FAA report:
Radio frequency interference (RFI), intentional or unintentional, can readily result in GNSS outages. As mentioned above, the satellite signals originate in medium earth orbit, approximately 12,000 miles from the earth’s surface. GPS signals are received at the user background noise level. Hence these signals are weak and readily overwhelmed by any of the multitude of signals emanating from terrestrial sources.
2.6.8 Satellite-based altimetry is subject to “signal-in-space” errors. The perfect barometric altimeter will read the exact pressure altitude at any specific point and time. But the perfect GNSS receiver will not always read the exact location or altitude at any specific point and time. The GNSS receiver depends on an external signal which may have a variable precision depending on conditions. The “signal” given by air pressure is not subject to such variation.
2.6.9 Along the same lines, a risk exists that the GNSS signals will simply not be available. On April 1, 2014 at 2115 UTC, all GLONASS satellites began transmitting erroneous broadcast messages, with some satellite positions off by up to 200 km. The problem lasted for up to 10 hours for some satellites.
2.6.10 There is also clear risk that the GNSS signal will be faulty. From an FAA report:
Faults do arise from within the GNSS. In recent years, major service faults have occurred approximately three times per year for GPS. Many of these can be attributed to some form of clock runoff, where the signal broadcast by a given satellite is not properly synchronized to the signal from the other satellites in the constellation. Others have been due to an upload of faulty navigation data from the GPS control segment to the GPS satellites for broadcast to the users. Either of these types of faults can introduce positioning errors that are hazardous to aviation users. Moreover, in normal operation, GPS may not detect these threats for several hours.
2.6.11 Constellation weakness, loss of one or more satellites, is also a concern.
The same FAA referenced above states,
“a spate of satellite failures in this aging constellation could weaken user geometry, and replenishment could take years to address.”
2.6.12 Aircraft performance with geometric altimetry will be different from than performance in a barometric environment. With regard to level flight, the issues are not expected to be significant. This is because in today’s pressure-based altimetry, ambient pressure is constant but slight power changes are required because the aircraft must move up and down with reference to the gravitational field. With geometric altimetry, the aircraft does not move vertically with reference to Earth but ambient pressure does change, and engine settings will adjust slightly to compensate.
A more significant issue is service ceiling. It’s possible an aircraft could be unable to maintain geometric altitude due to changing ambient conditions. For more information on these issues, see Appendix 3.
2.7 Mitigations and Improvements
2.7.1 Today’s GPS is very vulnerable to RFI because only one frequency is used. Dual- frequency GPS will largely reduce the impact of space weather.
From an FAA report:
Since 2010, new GPS satellites broadcast ranging signals for civil use on two aeronautical frequencies rather than one. These frequencies are designated L1 (1575.42 MHz) and L5 (1176.45 MHz). This frequency diversity will enable second generation SBAS and GBAS avionics to remove the effect of ionospheric propagation induced errors autonomously and thus obviate the most troublesome aspect of space weather – ionospheric storms. Today, these storms cause continuity breaks and availability outages for SBAS and GBAS.
2.7.2 Even dual-frequency GPS will remain vulnerable. Both L1 and L5 can be overwhelmed by hostile interference. The retention of elements of today’s navigation infrastructure is considered a necessary backup to any system based on GPS.
2.7.3 Advanced RAIM (ARAIM) may support vertical guidance for precision approach. This extension would be based on the frequency diversity described above and geometric diversity from new GNSS constellations.
2.7.4 The FAA GNSS Program Office performed a simulation analysis on historical data to assess the feasibility of ARAIM in a multi-constellation, multi-frequency configuration. They assumed a second GNSS system was in place and both constellations were providing dual frequency, L1-L5, services. The study found “that ARAIM would have provided adequate integrity performance throughout 2008 and 2009.”
2.7.5 ARAIM is one focus of the EU-U.S. Cooperation on Satellite Navigation, Working Group C. The Working Group established the ARAIM Technical Subgroup (ARAIM SG) to determine the feasibility of the concept. This group includes members from the U.S. Federal Aviation Administration (FAA), Stanford University (SU), the MITRE Corporation, Illinois Institute of Technology (IIT), German Aerospace Center (DLR), University FAF Munich (UniBW), the European Space Agency (ESA) and the European Commission (EC).
2.7.6 The SG seeks to develop ARAIM architectures that will support localizer precision vertical (LPV) operations down to 200 ft AGL. This represents the capability to fly a precision approach into every single airport in the world. Such a system must ensure that the pilot is warned within six seconds of any hazardous misleading information (HMI) before the navigation sensor error is greater than a certain amount (currently 35 meters for LPV-200).
2.7.7 A 2012 SG report identifies these threats to ARAIM: Satellite clock and ephemeris, signal deformation, code-carrier incoherence, inter-frequency bias, satellite antenna bias, ionospheric, tropospheric, and receiver noise and multipath.
2.7.8 The report also performed an analysis assuming both Galileo and GPS were operational. This study predicted
“LPV-200 availability if the constellation wide failure probability does not exceed 1×10-5 and the satellite failure probability ranges between 1×10-5 and 1×10-4.”
2.7.9 The “Sherpa” project also has the goal of LPV-200 for the Europe. According to the Sherpa Roll Out Plan, an LPV approach is almost identical to an ILS CAT I operation in terms of performances. A 2014 report assessed the actual limitations that might be encountered for the implementation of LPV-200 operations in the ECAC area, in line with ICAO’s PBN concept. Figure 6 shows recent data for LPV-200 availability in Europe using corrections from EGNOS, the European SBAS.
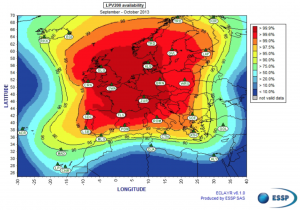
Figure 4: LPV-200 Performance in Europe, Sept-Oct 2013
2.7.10 Inaccuracies in GNSS satellite positions are generally associated with clock errors within the satellite. Improvements in clock technology and the development of more accurate satellite clocks can reduce the need for acquisition of four satellites by the GNSS receiver to three. Currently, the fourth satellite is needed to account for a time correction.
2.7.11 GPS IIIC, with launches beginning in 2030, is envisaged as an entirely self-monitoring system in which any erroneous signals contain an “invalid” flag.
2.8 Transition
2.8.1 The transition of aviation altimetry would obviously be a monumental challenge. Such an undertaking would take years if not decades of preparation. If and when geometric altimetry is found to be feasible and desirable, it will be necessary to make significant investments into planning the transition. Forming a concept for how this might take place will be of great value.
2.8.2 One such concept might be a top-down implementation with two transition altitudes/levels and three altitude ranges using a different altimetry basis:
- Altitude based on local pressure setting.
- Level based on standard pressure setting.
- Level based on geometric altitude.
The levels based on geometric altitude would then gradually be lowered over a long time to give operators time to equip. The initial levels based on geometric altitude could, for example, be F470 and above.
2.9 IFATCA Policy
2.9.1 There are no relevant policies in the IFATCA TPM.
Conclusions
3.1 Current GNSS technologies do not support the general use of geometric altimetry in aviation and air traffic control. Their precision and reliability are inadequate for these purposes.
3.2 Geometric altitude is available as an option to be transmitted in ADS-B, and ICAO is working to use this capability to replace the role of ground-based Height Measuring Units in the periodic recertification of altimeters for RVSM.
3.3 Future use of GNSS-derived geometric altitude to replace pressure-based altitude could:
- Eliminate transition altitudes and altimeter settings, which represent a substantial burden to the ATC system and a significant cause of level busts and controlled flight into terrain.
- Improve airspace efficiency and capacity by increasing the number of available altitudes, reducing the airspace used by procedures, and reducing terrain clearance margins.
- Support trajectory-based operations.
- Eliminate altimeter-related cold temperature corrections.
- Eliminate out-of-tolerance altimeter setting issues between sectors.
- Eliminate the need for ANSPs to maintain pressure reporting stations.
- Be a massive undertaking affecting virtually every single aircraft in the world.
3.4 Variations in service ceilings could be troublesome for aircraft in geo-level flight. (See Appendix 3)
3.5 The use of altitude based on GNSS would require the re-evaluation of all terrain maps and databases to include GNSS-derived geometric elevations.
3.6 Space weather and ionospheric storms could threaten the use of GNSS-derived altitude information, but this could be mitigated by the use of multiple frequencies.
3.7 Barometric pressure is always available for measurement of altitude, but GNSS signals are not. With just two operational systems, GPS and GLONASS, there are not enough satellites to cover the globe in support of GNSS-based altitmetry.
3.8 The theoretical framework has been established that dual-frequency, dual-constellation GNSS is a viable means to achieve ARAIM and provide GNSS receivers with vertical integrity.
3.9 The use of GNSS-based altitude within SBAS airspace could be an effective backup to barometric data for TCAS/ACAS systems vulnerable to altimeter setting and other errors.
3.10 The following would be required, at the very least, to support a transition to geometric altitude:
- Deploy new satellite constellations to provide more satellite availability.
- Improve the vertical integrity of GNSS-based receivers and provide the vertical integrity value in ADS-B.
- Retrofit all aircraft in the world with equipment including FMS, Transponders, displays, etc.
- Revise ICAO, ANSP, aircraft and carrier procedures.
- Provide for backup systems.
- Provide for backup procedures.
- Develop multi-constellation MOPS and provide for GNSS system interoperability.
- Implement a universal standard for geometric altitude reporting.
- Identify and develop mitigations for unique situations in which GNSS-derived data would be erroneous.
- Provide for controller and pilot training.
- Modify ATM systems to incorporate geometric altitude.
- Re-evaluation of all terrain maps and databases to include GNSS-derived geometric elevations.
- Global agreement on protection from deliberate signal interference.
Recommendations
4.1 It is recommended that IFATCA policy is:
IFATCA encourages development of technologies that improve the accuracy of vertical navigation.
References
“Analysis of the geometric altimetry to support aircraft optimal vertical profiles within future 4D trajectory management”, Javier García-Heras, Francisco Javier Sáez Nieto, Air Navigation Research Group, Polytechnic University of Madrid, Spain, May 2011.
“The Case for Geometric Altimetry”, Alex Fisher, The Log (British Airline Pilots’ Association magazine), Summer 2014, page 23.
“Phase II of the GNSS Evolutionary Architecture Study”, Federal Aviation Administration GNSS Program Office, February 2010.
“EU-U.S. Cooperation on Satellite Navigation”, Working Group C, ARAIM Technical Subgroup, Interim Report, Issue 1.0, 19 December 2012.
Skybrary – https://www.skybrary.aero/index.php/Altimetry_System_Error
Level Bust Working Group ‘On the Level’ Project Final Report, Civil Aviation Authority, London, December 2000.
CSSI Inc. Aviation Brochure 2013. (https://www.cssiinc.com/news/enhanced2-gps-monitoring-unit-e2gmu-now-available-from-cssi)
“Global Positioning System (GPS) Standard Positioning Service (SPS) Performance Analysis Report”, William J. Hughes Technical Center, NSTB/WAAS T&E Team, July 31, 2014.
“Description of Geometric Altitude for the EGPWS”, Allied Signal, 1998.
ICAO, Eighth Meeting of the Southeast Asia and Bay of Bengal Sub-Regional ADS-B Implementation Working Group (SEA/BOB ADS-B WG/8), Yangon, Myanmar, 5 – 7 December 2012.
ICAO Aeronautical Surveillance Panel, Working Group Meeting 17, Langen, Germany, 22-26 September 2014.
“GPS versus barometric altitude: the definitive answer”, Mark Graham, Cross Country Magazine, 23 July 2011. (https://www.xcmag.com/2011/07/gps-versus-barometric-altitude-the-definitive-answer/)
“The System: GLONASS in April, What Went Wrong”, GPS World, 24 June 2014.
Sherpa (Support ad-Hoc to Eastern Region Pre-Operational Actions in GNSS) Project, “LPV200 Roll Out Plan”, SHERPA-PLD-L200ROP-D4200, Under contract to GSA, the European GNSS Agency, 28 October 2013.
“Mean Sea Level, GPS, and the Geoid”, Witold Fraczek, Esri Applications Prototype Lab, July-September 2003.(https://www.esri.com/news/arcuser/0703/geoid1of3.html)
Appendix 1: Definitions
Advanced Receiver Autonomous Integrity Monitoring (ARAIM): Relies on a ground system to provide periodic updates regarding the nominal performance and fault rates of the multiplicity of contributing satellite constellations.
Altimetry System Error (ASE): The difference between the altitude shown on the altimeter and the altitude measured by the HMU.
Corrected Barometric Altitude (CBA): Provided by an Air Data Computer (ADC) using measured external static pressure and crew-entered local pressure correction. CBA may be in error under extreme temperatures, atmospheric conditions like inversion layers or strong pressure gradients, and by altimeter miss-sets.
Enhanced Ground Proximity Warning System (EGPWS): These systems emerged in the 1990’s and use GNSS position and altitude data with barometric pressure, airspeed and trajectory projections against an internal terrain and obstacle map to provide visual and aural warnings to pilots of any conflict.
Geoid: An imaginary, irregular surface determined by gravity measurements and intended to approximate mean sea level (MSL). This is the traditional reference for elevation, and is not geometrically correct.
Geometric altitude: An altitude derived from GNSS data and independent of pressure altitude that might be used to replace pressure altitude for air traffic control purposes. For GPS, this is measured reference the WGS84 model of the Earth.
Geometric height: An altitude determined by Enhanced Ground Proximity Warning Systems using pressure altitude, GPS altitude, radio altitude, groundspeed, roll angle and position, along with terrain and runway elevation data.
Global Navigation Satellite System (GNSS): A system of satellites that provide autonomous geo-spatial positioning with global coverage.
GLONASS: The Russian GNSS.
Ground-Based Augmentation System (GBAS): System that provides differential corrections and integrity monitoring of Global Navigation Satellite Systems in the vicinity of a host airport using ground-based equipment.
GPS III: The next generation of GPS satellites which begin launching in 2016. These will add a 4th civil signal on the L1 frequency, no selective availability (restrictions intended to protect national security), provide a 15 year lifespan and deliver enhanced signal reliability, accuracy and integrity.
Height Measuring Unit: A ground-based technology to determine the exact height of an aircraft by triangulation of its transponder signal (HMU).
Indicated altitude: Measured by a simple aneroid barometer calibrated to show altitude instead of pressure. The altimeter shows the difference between actual barometric pressure and either a pilot-entered sea level pressure, or, above the transition altitude, a standard setting of 1013.25 hPa or 29.92 in Hg.
LPV, LPV-200: Localizer performance with vertical guidance (LPV) are the highest precision GNSS (with SBAS) aviation instrument approach procedures currently available without specialized aircrew training requirements. LPV-200 provides guidance to 200 feet AGL.
Orthometric height: Elevation of terrain and objects with respect to the geoid (MSL). Almost all maps and Geographical Information Systems (GIS) use this.
Receiver Autonomous Integrity Monitoring (RAIM): A technology developed to assess the integrity of global positioning system (GPS) signals in a GPS receiver system.
Reduced Vertical Separation Minima (RVSM): Reduction in vertical separation minima between FL290 and FL410 inclusive, from 2000 ft. to 1000 ft. RVSM was implemented throughout most of the world between 1997 and 2008.
Radio Frequency Interference (RFI): Radio signals which interfere with the correct functioning of GNSS and associated systems.
Satellite-Based Augmentation System (SBAS): System that provides differential corrections and integrity monitoring of GNSS over a global region using satellite-based equipment.
Sherpa: The “Support ad-Hoc to Eastern Region Pre-Operational Actions in GNSS” project which brings LPV-200 to Europe.
Terrain Awareness and Warning Systems (TAWS): A broad term for Enhanced Ground Proximity Warning Systems.
True Altitude: Actual height of the aircraft above the geoid (MSL).
Wide Area Augmentation System (WAAS): A satellite-based air navigation aid developed by the Federal Aviation Administration to augment the Global Positioning System (GPS), providing differential corrections and integrity monitoring.
WGS84: A flattened ellipsoid intended to represent a mathematically-derived and theoretical sea level, and which serves as the reference coordinate system used by the Global Positioning System (GPS).
Appendix 2: Discussion of the Shape of the Earth
The use of geometric altitude brings a number of complicating factors with it. One is the shape and consistency of the Earth itself.
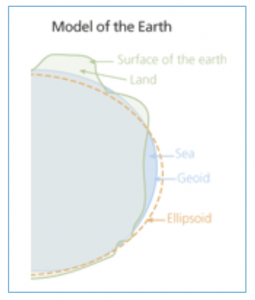
Figure 5: The Earth is not flat, but it isn’t round either
[Terrain contours are greatly exaggerated for illustration purposes]
The Earth has massive differences in density of magma in the crust that warp gravity and create inconsistencies in mean sea level (MSL). For instance, the force of gravity in areas north of Australia is slightly less than elsewhere. If the Earth were more homogenous in composition, the seas in these areas would sink and more land would be exposed.
The “geoid” is a mathematically-defined shape that approximates the surface of the Earth. It was intended to roughly approximate MSL, considering a theoretical MSL extending under the continents. But because of gravity distortions the geoid is not completely accurate. In the past, there was no practical way to actually measure the geoid so MSL was used to approximate it.
GNSS enabled the physical measurement in three dimensions of any point on or above the Earth. GNSS uses WGS84, an ellipsoid coordinate system for both its horizontal and vertical datums. This “flattened sphere” is a geometric model of the earth’s surface that replaces MSL as the main geodetic reference or vertical datum. It is a geometrically correct shape and MSL (the geoid) is not, so there are significant differences. Height above the WGS84 ellipsoid will therefore not be the same as MSL. For example, a site in Redlands, California is 400 feet MSL, but only 368 feet above WGS84.
The Earth Geodetic Model (EGM96), developed in a collaborative effort by NASA Goddard Space Flight Center, the National Imagery and Mapping Agency (NIMA), and Ohio State University, has been used to compute geoid undulations accurate to better than one meter (except in areas lacking accurate surface gravity data). The values of this surface show at every location how much MSL varies from the WGS84 ellipsoid used as the reference for GPS elevation readings. In other words, EGM96 shows how uneven the gravitational potential of the ocean’s surface really is. The maximum range of the geoid undulations with respect to the WGS84 ellipsoid is 192 meters. The biggest anomaly was discovered southeast of India where the geoid is 105 meters below the ellipsoid, and its highest swelling was observed in eastern Indonesia. Figure 5 shows how the WGS84 ellipsoid differs from the geoid around the globe.
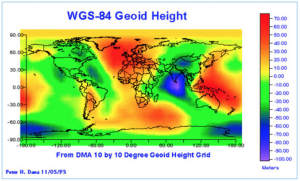
Figure 6: Difference between WGS84 and the geoid
A switch to geometric altimetry is exceedingly complex because the measurement of altitude (or terrain elevation) depends on a multitude of factors many of which are highly localized. The geoid adjusts for gravitational variation around the world so that MSL is a close approximation of actual sea level. But WGS-84 does not.
Appendix 3: Practical Aspects of Geometric Altitude Assignment
Today’s aircraft fly level at a constant barometric altitude. The pilot insures this by managing the trim and this directly indicates a constant external static pressure on the aircraft.
Were the aircraft to be assigned a constant geometric altitude, it would no longer be anchored to external pressure. It would pass through small pressure gradients while cruising at the assigned altitude, with the air density changing accordingly. As a result, the engine performance might be constantly adjusted to accommodate different air intake densities. Some are skeptical as to how aircraft would perform in geometrically level flight and whether it would cause problems for flight planning and trajectory management.
Constant pressure contours in the atmosphere can be compared to the surface of a golf putting green, with gently varying slopes up, down, right and left. For today’s aircraft to follow those contours and remain level, it must move higher and lower with reference to the Earth. In geometrically level flight, the same aircraft would not move up or down reference the Earth but would experience changing pressure altitude. Whether geometrically-level or barometrically-level, power settings will only change very slightly in either case, if at all.
Service ceilings in a world of geometric altimetry would always be a function of atmospheric conditions. There are variations in barometric altimetry as well because temperature also affects ceiling and of course because aircraft loading varies, but differences could be more pronounced in geometric altimetry.

