
46TH ANNUAL CONFERENCE, Istanbul, Turkey, 16-20 April 2007WP No. 84Aerodrome – Categorization of Approach TypesPresented by TOC |
Summary
During the last few years there has been a significant increase in the number of approach types in use. This is due in the main to the introduction of new technologies, such as Global Positioning System (GPS) and Area Navigation (RNAV). States have introduced approach types with differing terminology and differing criteria. There is a pressing need to rationalise the multitude of approach types and to introduce consistent terminology and criteria. There are plans within ICAO to try and achieve this through the Performance Based Navigation (PBN) concept. IFATCA should support such a move. In the meantime, there are several recommendations that should be accepted to assist controllers in dealing with the various approach types.
Introduction
1.1. The Technical and Operations Committee (TOC) has been tasked to investigate the classification of approach types. There are many types of approaches that can be flown and the equipment and competencies required vary considerably. This paper outlines the various types of approaches and places them into a classification.
Discussion
2.1. An instrument approach or Instrument Approach Procedure (IAP) is a type of air navigation that allows pilots to land an aircraft in reduced visibility, known as Instrument Meteorological Conditions (IMC), or to reach visual conditions permitting a visual approach and landing.
2.2. Instrument approaches are normally designed so that pilots of aircraft in IMC can navigate to an airport by means of radio, Global Positioning System (GPS) or Inertial Navigation System (INS) navigation with no assistance from ATC. Having arrived in the vicinity of the airport, the pilot will then hold, if required, prior to flying a defined procedure enabling the aircraft to get to a position from where there is sufficient visual reference of the runway for a safe landing to be made, or if suitably equipped and trained making a ‘blind’ landing.
2.3. The entire approach is defined and published so aircraft have an established procedure to follow in the event of a radio failure. They also enable instrument approaches to be flown procedurally at airports where ATC does not use radar, or in the event of a radar outage.
2.4. Instrument approaches are generally comprised of 5 phases. These are:
- Arrival – the pilot navigates to the Initial Approach Fix (IAF). This fix is often also the holding fix.
- Initial Approach – this is the phase of flight after the IAF.
- Intermediate Approach – some complex approaches require this phase, which commences at the Intermediate Fix (IF) and terminates at the Final Approach Fix (FAF).
- Final Approach – this commences at the FAF, which is normally between 4 – 12 NMs from the runway threshold and aligned with the runway. The final approach will normally incorporate a published descent gradient, which is typically between 2.5 and 6 degrees.
- Missed Approach – in the event that visual reference is not established, and the aircraft cannot make a ‘blind’ landing, the pilot will commence a climb to a safe altitude at the Missed Approach Point (MAP). The pilot will navigate to a position from where another approach can be commenced or an alternative course of action, such as a diversion, can be initiated.
2.5. Aircraft can be vectored (headings are provided by ATC) towards the final approach track. The use of vectors can replace the phases of flight listed above and often results in a reduced track mileage and enables a more expeditious flow of traffic. This in turn allows traffic levels to be increased when compared to the use of full procedural approaches.
2.6. Approaches have been classified as either precision or non-precision, depending on the accuracy and capabilities of the navigational aids used. Precision approaches utilize both lateral (course) and vertical (glideslope) information.
2.7. However, a new classification of approach has recently been introduced. This classification is currently known as Approach Procedure with Vertical Guidance (APV). In terms of hierarchy, it sits between the existing classifications of precision and non-precision.
2.8. Precision Approach
2.8.1. There are several different types of precision approach. These include:
- Instrument Landing System (ILS)
- Microwave Landing System (MLS)
- Precision Approach Radar (PAR).
2.8.2. ILS approaches are divided into different categories. These start with an ILS Cat I which has a decision height of 200ft. The decision height lowers progressively with Cat II and Cat III, both of which require improved levels of equipment and training.
2.8.3. Cat III ILS has three sub-categories which refer to the varying Runway Visual Range (RVR) requirements. The most demanding category is ILS Cat3c, which offers the capability of making ‘blind’ landings, i.e. zero visibility.
2.8.4. MLS has yet to be introduced operationally, although numerous trials have been conducted over many years. Work is currently underway to resolve some known issues identified with multi-mode airborne receivers.
2.8.5. PAR is a radar technique that is similar in concept to a Surveillance Radar Approach (SRA). However, a PAR can be conducted down to about 0.5NM from the threshold. PARs utilise fast scanning radars to provide an indication of the aircraft’s vertical and lateral profile. These approaches tend these days to be used predominantly by the military.
2.9. Non Precision Approaches
2.9.1. As with precision approaches, there are several varieties of non-precision approach. These include:
- VHF Omni-directional Range (VOR)
- Non Directional Beacon (NDB)
- SRA
- Tactical Air Navigation (TACAN)
- Lateral Navigation (LNAV) – Non-Precision Approaches (RNAV NPA).
2.9.2. Most of the above non-precision approaches utilize conventional ground based
navigation aids. For instance, VOR, NDB and TACAN are all navigation aids.
2.9.3. SRA is a technique whereby a controller will pass heading and descent instructions to an aircraft so as to bring the aircraft into a position where it is aligned with the runway when it established visual reference. SRAs typically terminate at about 2NM from touchdown. SRAs are a time consuming, labour intensive form of non-precision approach.
2.9.4. LNAV is an RNAV approach whereby only lateral navigation is provided. There is no vertical guidance offered.
2.10. Approach Procedure with Vertical Guidance
2.10.1. There are various types of APV approaches being progressed. These include:
- APV using Barometric Vertical Navigation (APV Baro-VNAV)
- APV using Space Based Augmentation System (APV SBAS)
- APV using Ground Based Augmentation System (APV GBAS)
2.10.2. APV procedures generally require Global Navigation Satellite Systems (GNSS) in order to be flown. Basic GNSS is achieved through the use of a Global Position System (GPS). More advanced types of GNSS include augmented GPS and differential GPS.
2.10.3. Augmentation of GPS is provided by different systems depending on the geographical location. A Wide Area Augmentation System (WAAS), which uses a series of ground reference stations to calculate GPS correction messages, is provided in North America. The European Geostationary Navigation Overlay Service (EGNOS) is due to come on-line in the next few years and will provide augmented GNSS in Europe and North Africa. Japan has a similar system known as the Multi- Functional Satellite Augmentation System (MSAS).
2.10.4. Differential GPS (DGPS) can improve the normal GPS accuracy of 4 – 20 meters to 1 – meter. DGPS uses a network of stationary GPS receivers to calculate the difference between their actual known position and the position as calculated by their received GPS signal.
2.10.5. LNAV / VNAV is another term used to refer to approaches with vertical guidance based on barometric inputs, i.e. APV Baro-VNAV.
2.10.6. Baro-VNAV is intended to be applied where vertical guidance and information is provided to the flight crew on instrument approach procedures containing a vertical flight path defined by a vertical path angle.
2.10.7. LPV is an acronym meaning Localiser Precision with Vertical guidance and is a type of approach where vertical guidance is provided by reference to GNSS. LPV approaches are otherwise known as APV SBAS.
2.10.8. APV procedures that utilise Ground Based Augmentation Systems (GBAS) will probably offer a minima that will be similar to that available from ILS. As such, it is feasible that APV GBAS procedures, which are also referred to as Local Area Augmentation System (LAAS) procedures, may be classified as a Precision Approach.
2.11. Required Navigation Performance
2.11.1. Required Navigation Performance (RNP) is defined by ICAO as “a statement of the navigation performance necessary for operation within a defined airspace”. Part of a broader concept called “Performance-based Navigation”, RNP is a method of implementing routes and flight paths that differs from traditional methods as an RNP path has an associated performance specification that an aircraft must meeting before the path can be flown.
2.11.2. RNP is used for approach procedures. RNP approach (RNP APP) procedures are characterized by existing RNAV (GNSS) approach procedures designed with a straight segment.
2.11.3. RNP APP procedures require a total system error of ± 1.0 NM in the initial, intermediate and missed approach segments of the instrument approach procedure, and a total system error of ± 0.3 NM in the final approach segment. However, where required by terrain, obstacles, the proximity of other routes or restricted airspace types, lower RNP values can be specified for final approach, permitting lower minima. Values of 0.11NM are in use in certain locations that have challenging terrain.
2.11.4. RNP offers benefits over other instrument approach types as the design has straight edges running parallel to the centreline of the procedure whereas many other approaches, such as ILS, have splayed edges. The straight lines used by RNP in procedure design results in a smaller protected area and can mean that obstacles offset from the extended centreline may be excluded whereas they would fall within the protected area of an ILS.
2.11.5. Air Traffic Controllers providing approach control services in an ATS unit where RNP APP is implemented, should have completed training in the following:
a) RNP APP procedures;
i) The title of the procedure and phraseology to be used to clear aircraft for the approach.
ii) Radar vectoring techniques particular to aircraft executing a RNP APP. When Radar vectoring to final approach, controllers need to ensure the capture of the final approach occurs sufficiently prior to the final approach fix.
b) RNP APP equipment, capabilities, requirements and operational approvals;
c) Waypoint fly-by vs. fly-over concept;
d) Effect of interference on signal coverage;
e) GNSS receiver, RAIM integrity concept, integrity alerts, and Fault Detection and Exclusion (FDE).
2.11.6. If unable to comply with the requirements of an RNP APP procedure, pilots must advise Air Traffic Service as soon as possible. Pilots must notify ATC of any loss of the RNP APP capability, together with the proposed course of action.
2.11.7. For RNP values of less than 0.3NM additional checks and measures are needed in order to get approval to fly such procedures. These procedures are known as Special Aircraft and Aircrew Authorisation Required (SAAAR) in North America which is where they have been used the most so far. ICAO has recently announced that they will become known as RNP Authorisation Required (AR) procedures. Similar procedures are also in use in other areas of the world, such as New Zealand, Australia and Nepal.
2.11.8. RNP Authorization Required Approaches (RNP AR APP) represent the ICAO equivalent to the FAA SAAAR procedures. The European Aviation Safety Agency (EASA) is developing equivalent guidance.
2.11.9. The ICAO Performance Based Navigation (PBN) manual states that controllers should be familiar with the characteristics of RNP AR APPs. In particular:
a) the title of the procedure and phraseology to be used to clear aircraft for the approach,
b) radar vectoring techniques particular to aircraft executing an RNP AR APP; including not clearing an aircraft direct to a fix at the start of the curved path. If vectoring aircraft to intercept the procedure prior to a turn, the intercept must be early enough to ensure the aircraft is established on course prior to initiating the turn,
c) Importance of airspeed on curved paths. Aircraft cannot exceed the maximum airspeeds published for the procedure in any segment, i.e. a procedure-specified limit (when a speed restriction is required through the procedure design).
2.12. RNAV Approach Classification
2.12.1. As there are various types of RNAV a table is provided below in order to try and show the classifications and the characteristics of these differing types of approach.
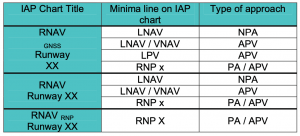
Table 1: RNAV Approach classification
2.12.2. As can be seen in the above table, there are several variations of RNAV approaches. However, they can all be allocated to the classifications of NPA, APV or PA.
2.13. Other Approach Types
2.13.1. There are various other types of approach procedures that are published in different locations globally. These include procedures such as GPS and FMS approaches. At present, these approaches are likely to fall under the classifications detailed above. For instance the classifications of APV and RNP are likely to be suitable categories for them.
2.14. Approach type confusion
2.14.1. There are now a multitude of approach types in use in the world. The sheer variety of approach types and the differing names of these approaches, together with the fact that the same approach can be named differently from one State to another is a potential source of confusion to both aircrew and controllers.
2.14.2. As highlighted previously, the number of sub categories of approach types is considerable. Due to the number of approach sub categories there is a possibility that controllers may become confused about the type of equipment and approval required for specific procedures.
2.14.3. Different procedure types and the varying levels of aircraft equipage and capability may require aircraft to be handled in different ways. If this is the case, the workload of approach controllers may increase due to this form of mixed mode operation.
2.14.4. The number of approach types should be reduced. In addition, there should be a degree of transparency to the controller as to the sub category of approach that the aircraft is flying. In other words, the controller should not need to differentiate between sub categories of approach type. For instance, the controller should be able to simply clear the aircraft for an RNAV approach, without having to be aware of the sub category of approach, such as APV Baro-VNAV, APV SBAS, etc that is being flown.
2.14.5. The minima for any approach type should be determined by the flight crew dependent upon the aircraft equipage and the crew’s capability.
2.15. Equipage / Capability Indication
2.15.1. There is a need for controllers to be aware of the basic capability of an aircraft in terms of its navigational equipage or capability. This can normally be achieved through completing certain fields in the standard flight plan(s).
2.15.2. IFATCA has policy regarding Advanced Approaches. A statement in this policy reads:
| “To permit advance planning, the approach capability of the aircraft should be included on the flightplan and displayed to the controller using the appropriate data display system.” |
2.15.3. IFATCA policy regarding RNAV has a statement that reads:
| “Controllers should be presented with information, by any suitable means, concerning navigational capability of aircraft under their control.” |
2.15.4. For completeness, IFATCA should introduce a policy statement to cover the need to make controllers aware of the navigational equipage and capability of aircraft with regard to both RNAV and RNP approaches.
2.15.5. This new policy statement could read as:
“ATC systems should be adapted where necessary to show controllers that an aircraft is capable of making an RNAV or RNP approach.”
Conclusions
3.1 There is concern in the aviation community as a whole about the proliferation of non standard terminology, in particular new terminology associated with the introduction of performance based navigation operations. There is a pressing need to bring together the range of terms and definitions for comparison and co-ordination.
3.2 As detailed in the discussion section of the paper, there are many different types of approach in use today. The number of approach types is set to increase as both RNAV and RNP procedures continue to be introduced.
3.3 Controllers need to know an aircraft’s capability, e.g. GPS equipage, APV approval, etc. ATC systems should be adapted where necessary to show controllers that an aircraft is capable of making an RNAV approach.
3.4 Due to the number of approach types there is a possibility that controllers may become confused about the type of equipment and approval required for specific procedures.
3.5 There is a concern that the variety of approach types being introduced increases complexity and introduces a type of mixed mode operation.
3.6 The workload of approach controllers may increase if aircraft have to be handled in different ways based upon their equipage or capability.
3.7 There is a need to reduce the complexity of the approach types. The specific type of approach, e.g. APV Baro-VNAV or APV SBAS, should be transparent to the controller who should simply be able to clear the aircraft for an RNAV approach without having to contemplate the type of approach that will be flown. The approach type itself, e.g. LNAV only, LNAV / VNAV or LPV, and the minima should be determined by the aircrew based upon equipment fit and training.
Recommendations
It is recommended that;
4.1 IFATCA Policy is:
“The variety of approach types, and the associated complexity to the controller, should be reduced.”
and is included on page 3 2 2 10 of the IFATCA Manual.
4.2 IFATCA Policy is:
“The type of approach sub-category should be transparent to the controller in order to maintain an acceptable workload. The approach sub-category and the associated minima should be determined by the aircrew based upon equipment fit and training.”
and is included on page 3 2 2 10 of the IFATCA Manual.
References
EASA AMC 20XX (draft).
ICAO, Performance Based Navigation manual, draft edition 4.1.
ICAO Global Navigation Satellite System (GNSS) Manual Doc. 9849.
ICAO Air Traffic Services Annex 11.
ICAO PANS ATM Doc 4444.

