
DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
47TH ANNUAL CONFERENCE, Arusha, Tanzania, 10-14 March 2008WP No. 87Investigate ADS-B Applications – Incorporation in A-SMGCSPresented by TOC |
Summary
Automatic Dependant Surveillance – Broadcast (ADS-B) has emerged as an affordable surveillance technology that is fast finding its use as an ATM Surveillance system. Different areas of application for ADS-B are under development, including the use as a surface surveillance input into Advanced Surface Movement and Control Systems (A-SMGCS). A- SMGCS itself is an independent system that supports aerodrome- and ground movement control through its functions of surveillance, guidance, and control. TOC is investigating the issues and involvement of ADS-B as a surveillance input to the surveillance function of A- SMGCS. This working paper is recommended as information material only.
Introduction
1.1 In 2006, the IFATCA Technical and Operations Committee (TOC) developed a working paper on Automatic Dependent Surveillance – Broadcast (ADS-B); “Surveillance Application Policy – Operational Application of ADS-B” that was presented at the 2007 IFATCA conference in Istanbul. From that working paper came several recommendations on the further study of ADS-B. One of these recommendations being the Incorporation of ADS-B into Advanced Surface Movement Guidance and Control Systems (A-SMGCS). This working paper was consequently placed on the Arusha 2008 Technical Work Program.
1.2 This working paper should be read together with the working paper “Surveillance Application Policy – Operational Application of ADS-B”; Istanbul 2007 – working paper 94, as detailed knowledge on the working of ADS-B technology is contained in that paper and is not repeated in here.
1.3 The description of the A-SMGCS as set out by ICAO is a generic description that purposely steers away from naming specific technologies to be implemented in the construction of an A-SMGCS. This approach allows for any existing or new technology to be used provided that it meets the systems requirements. This paper shall explore the incorporation of one such technology, ADS-B, into the A-SMGCS.
1.4 This working paper does not attempt to fully describe all the requirements of an A- SMGCS, but focus on those elements where ADS-B has direct or indirect impact on.
1.5 A-SMGCS definition; ICAO Doc 9830 Advanced Surface Movement Guidance and Control Systems Manual defines A-SMGCS as:
“A system providing routing, guidance and surveillance for the control of aircraft and vehicles in order to maintain the declared surface movement rate under all weather conditions within the Aerodrome Visibility Operational Level (AVOL) while maintaining the required level of safety.”
Discussion
2.1 A-SMGCS System Description
2.1.1 Objectives of A-SMGCS
The objective of SMGCS is to provide guidance and control functions to aircraft, vehicles and personnel on the surface of the aerodrome through the use of surface markings, lighting, designated standard routing etc. A-SMGCS is intended to exceed this capability by providing spacing to aircraft in conditions below that where ‘see and be seen’ can be used to avoid collision, increase safety, and allow for better capacity throughput than was possible with SMGCS.
2.1.2 A-SMGCS System Architecture
Graphic Representation of generic A-SMGCS architecture:
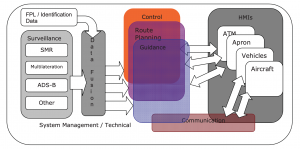
Several different surveillance technologies can provide surveillance data input to the A- SMGCS system. These being Surface Movement Radar (SMR), Multilateration, ADS-B or any other surveillance technology available.
The surveillance data from the different technologies are fused together and correlated with the identification information of the aircraft/vehicle from the flight plan/identification data.
The correlated traffic position is then used when performing the control, route planning and guidance functions of the A-SMGCS. Several Human Machine Interfaces (ATM, Apron, Aircraft and Vehicle) allow for interaction with the control, routing planning and guidance functions and allows for a graphic representation of the ground picture to ATC, ramp controllers, pilots and vehicle drivers.
2.1.3 A-SMGCS may incorporate several surveillance sensors to provide position and identification information. Data from these sensors is incorporated with data from a Flight Data Processor (FDP) and intent information from the aircraft or vehicle to perform the route planning, control and guidance functions. Information provision, control, route planning and guidance interaction with the system takes place through electronic means to the various users through a separate dedicated HMI.
2.1.4 A-SMGCS Concepts
Certain concepts have been identified to describe the requirements for A-SMGCS. These concepts are specified for the system and are not dependent on the surveillance technology input, such as ADS-B. These concepts are:
- A-SMGCS should make use of common modules so that it is adaptable to meet the individual requirements of different aerodromes.
- A-SMGCS will both support operations in low visibility as well as support capacity improvements under all conditions.
- A-SMGCS will provide more accurate guidance and control and ensure spacing between all aircraft and vehicles on the aerodrome in low visibility.
- A-SMGCS should provide improved situational awareness to air traffic controllers, pilots and vehicle drivers. This can be achieved through electronic display that is available to Air Traffic Control (ATC) through the Air Traffic Management (ATM) HMI, to pilots via Cockpit Display and Traffic Information (CDTI), and vehicle drivers through electronic displays.
2.1.5 Surveillance will provide accurate position and identity information on aircraft and vehicles on the aerodrome surface in order to provide complete situational awareness to all users and may include conformance monitoring with taxi instructions and conflict alert and resolution. The system should be able to detect any incursion of designated protected areas such as runway strips and taxiways.
2.1.6 A-SMGCS should support the following interdependent functions:
a. Surveillance;
b. Routing;
c. Guidance; and
d. Control.
2.2 Surveillance
2.2.1 ADS-B has a direct impact on the function of surveillance as it could be the sole method used to provide surveillance in an A-SMGCS. ICAO does not specifically recommend that more than one surveillance input should be used for A-SMGCS, but does stipulate the requirements and prerequisites that accompany an A-SMGCS. Any A-SMGCS may use any number of surveillance sensors such as Surface Movement Radar (SMR), multilateration (also called multistatic dependant surveillance), and ADS-B in an integrated surveillance system. ADS-B does not meet all the surveillance requirements of A-SMGCS by itself. The future benefit of including ADS-B is the use of intent information. The A-SMGCS system could be enhanced by the knowledge of aircraft / vehicle intent parameters such as waypoints, routes, speed and heading through the downlink of those parameters by an integrated ADS-B input.
2.2.2 The surveillance function of an A-SMGCS should be able to support the following requirements:
- Provide accurate position information on all movements inside the protected areas. ADS-B is able to comply with this requirement.
- Provide Identification and labelling to authorized movements. ADS-B is able to comply with this requirement.
- Cope with moving and static aircraft and vehicles. ADS-B is only able to comply with this requirement if the moving and static aircraft are equipped and broadcasting their position, if either aircraft or vehicles are not equipped or not powered and selected then ADS-B information will not be received by the system.
- Be able to update data needed for guidance and control both in time and position along the route. ADS-B provides updates broadcast at 0.5sec intervals and therefore is able to comply with this requirement.
- Be unaffected by weather- and topographical conditions. ADS-B uses Global Navigation Satellite Systems (GNSS) information which is unaffected by weather due to the high frequencies used by GNSS. ADS-B propagation itself, on frequency 1090 MHz, is affected by the weather. However for the application of ADS-B in A-SMGCS the effect is negligible due to the short distances that the signals have to travel.
2.3 The operational status of all surveillance equipment should be monitored and alerts be provided. ADS-B ground based infrastructure must meet the required requirements as set by ICAO. This includes normal redundancy provisions, back-up systems etc.
2.2.4 Seamless integration of surveillance should be provided between the A-SMGCS and other surveillance in the vicinity of the aerodrome. ADS-B may be one of the surveillance technologies that are used in the vicinity of the aerodrome.
2.2.5 The surveillance function should provide continuous information to allow detection of deviations from authorized routes, with update rates that will allow adequate system response. For the use of ADS-B in A-SMGCS the requirement for the Navigational Uncertainty Category (NUC) to be derived using Horizontal Protection Limit (HPL) as a method of calculation (as described in IFATCA 07 WP No.94 paragraph 2.2.1.3) is very important due to the high accuracy required.
2.3 Reliability
2.3.1 When determining the reliability of the surveillance function of the A-SMGCS the following specifications should be considered:
a) Probability of Detection (PD) is the probability that an aircraft or vehicles will be detected by the systems and displayed by the system;
b) Probability of false detection (PFD) is the probability that a false target will be detected and displayed;
c) Probability of Identification (PID) is the probability that the correct identification of an aircraft of vehicle will be detected and displayed; and
d) Probability of False Identification (PFID) is the probability the identification of an aircraft or vehicle will not be detected and displayed correctly.
These requirements are referring to the A-SMGCS system as a whole. The importance of the A-SMGCS to have a system wide reliability depends on the multiple redundancies and back-up system/processes that are required.
The A-SMGCS system will need to be assessed as a ‘whole set of components’ in it’s determination of reliability. An ADS-B input would need to meet this expectation – it may not have the same scrutiny as a stand a lone component and may not need the same redundancy as SMR or even multi-lateration. The determination of such will be in the system operational specifications.
2.4 Coverage
2.4.1 The surveillance function should be able to detect the position and identification of aircraft and vehicles on the movement area and the protected areas covered by the A- SMGCS in all conditions. This requirement should be applied universally through all conditions of visibility.
2.4.2 The area of surveillance should be up to an altitude so as to cover missed approaches and low level helicopter operations.
2.4.3 The area of surveillance should extend onto final approach from such a distance that arriving aircraft can be monitored for sufficient time to allow for planning in as far as departing aircraft and crossings over the runway is concerned.
2.4.4 Identification of arriving aircraft should be provided to the A-SMGCS system no later than 5 minutes or 10NM from touchdown. This requirement may be met by using information from another source than the surface surveillance system.
2.4.5 The requirements in 2.4.1 to 2.4.4 above can be achieved for ADS-B through careful positioning of the receiver stations around the aerodrome.
2.5 Identification
2.5.1 The surveillance function should provide identification information of aircraft and vehicles to the A-SMGCS and should be able to correlate the identification with the location of that aircraft or vehicle. The type of aircraft should also be verified by the surveillance system.
2.5.2 These requirements are met by ADS-B systems used in A-SMGCS through the same methods of identification as is used for Mode–S operations. ADS-B systems make use of the Flight ID to assign identification to aircraft and ground vehicles. The ICAO 24 bit identification should be considered also as a secondary method if incorrect Flight ID is entered.
2.5.3 Vehicles that are not expected to use the manoeuvring area under normal operations (Visual Meteorological Conditions, Instrument Meteorological Conditions and Low Visibility Operations) may not be equipped with ADS-B transmitter and may therefore not be identified and displayed by the ADS-B component of A-SMGCS. This is why ADS-B as a stand alone input of surveillance will not meet the requirement of an A- SMGCS system but when used as part of a multiple input of surveillance will contribute significantly.
2.6 Accuracy
2.6.1 Longitudinal accuracy of 6 meters is recommended by ICAO. This requirement is based on the time required to alert and prevent an incursion.
2.6.2 Horizontal accuracy is based on a 3 meters wingtip clearance required between the aircraft and obstacles surrounding the stand.
2.6.3 ADS-B is dependent on the aircraft navigation system, such as GNSS, to provide the required level of accuracy required. The maximum accuracy that can be achieved without any augmentation is 10 meters. With the use of Space Based Augmentation Systems (SBAS) the maximum accuracy can be better than 10 meters. In order to achieve the requirement of a maximum accuracy of 3 meters, a Ground Based Augmentation System (GBAS) is required.
2.6.4 Eurocontrol have reported in an information paper to the Airport Operations Team (AOT)/22nd meeting that “ADS-B systems on aircraft may not provide position data with sufficient accuracy and reliability for the A-SMGCS application. Further tests, performed using ADS-B on vehicles equipped with Differential GPS, gave satisfactory results.” (EUROCONTROL AOT/22 IP17 Level 1 Feasibility Study “The use of A-SMGCS Surveillance in low visibility operations”)
2.7 Data update rates and Latency
2.7.1 An update rate of 1 second is required in order to prevent incursions. In order to support situational awareness acquired from displays that displays movement rates, the standardization of update intervals is important. A variance of 10% is allowed on the update interval. ADS-B updates surface position at a rate once every 0.5 seconds in high rate and once every 5 seconds in low rate. High rate is the default reporting rate and will remain the update rate provided the target moves at a rate of 1/3 meters per second.
2.7.2 Latency is the time delay between the position report and its use to determine loss of spacing or conflicts. ICAO determined a latency of 1 second for A-SMGCS. ADS-B does not meet this requirement.
2.8 Supplementary Requirements
2.8.1 Target Level of Safety
The A-SMGCS Target Level of Safety (TLS) should be 1×10-8 collisions per operation involving aircraft on the ground (ICAO Doc 9830 Advanced Surface Movement Guidance and Control Systems Manual, Chapter 4). To achieve this, the following safety performance measurements will be required from the flowing functions:
- Guidance: 3 x 10-9 per operation;
- Surveillance: 3 x 10-9 per operation;
- Control: 3 x 10-9 per operation; and
- Routing: 1 x 10-9 per operation.
2.8.2 The safety performance of the ADS-B system meets the safety requirements.
Conclusions
3.1 ADS-B does not meet all the requirements for a stand alone surveillance input as specified for A-SMGCS.
3.2 The full implementation of ADS-B in A-SMGCS will not be realized for some time to come due to the technical requirements such as the retrofitting of equipment, latency, reliability, and accuracy issues.
3.3 Where ADS-B is used a sole method of surveillance input, targets such as unauthorised vehicles on the manoeuvring area that are not equipped with ADS-B will not be detected by the A-SMGCS.
3.4 In the meantime “new” technology such as multilateration and its various applications are poised to overtake ADS-B in certain applications and scenarios due to the flexibility (airborne and ground application, integration with older technology, and integration with ADS-B etc.) of such new technology. This will be specifically prevalent to areas of implementation what pose higher technical standards such as for ground surveillance.
3.5 Due to the specific benefits that can be achieved from different technologies, the surveillance blanket of the future will be a mosaic compiled from various technologies. Each technology applied where it is the most beneficial and cost effective and where the specific technology can meet all the requirements for that specific application. Examples are a SMR and multilateration system incorporating ADS-B on the ground and in terminal areas.
Recommendations
It is recommended that;
4.1. This paper is accepted as information material.
References
ICAO Doc 9830 Advanced Surface Movement Guidance and Control Systems Manual, AN/452, 2004.
ICAO Doc 9476 Surface Movement Guidance and Control Systems Manual.
Surveillance Applications Policy – Operational Applications of ADS-B; IFATCA 07 WP no. 86.
IFATCA Manual.
RTCA DO242A.
RTCA DO260/DO260A.
ERA corporation; www.erabeyondradar.com.
Sensis Corporation; www.sensis.com.
Technical Verification and Validation of ADS-B/VDL Mode 4 for A-SMGCS, Tekniska Högskolan Linköpings Universitet.
EUROCONTROL AOT/22 IP17 Level 1 Feasibility Study “The use of A-SMGCS Surveillance in low visibility operations”.
EUROCONTROL AOT/22 IP16 Level 2 Feasibility Study “Improvements to A-SMGCS Level 2”.

