
DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
47TH ANNUAL CONFERENCE, Arusha, Tanzania, 10-14 March 2008WP No. 86Investigate 4D Trajectory ConceptsPresented by TOC |
Summary
This paper is intended to introduce the concept of 4-D Trajectory technologies and its implementation worldwide. It will look at current applications as well as the short and long-range implementation plans. It will explore the current and potential gains associated with 4-D Trajectory flights as well as discuss some of the problems associated with implementing these technologies in airspace that was not specifically designed to accommodate it. Additionally, it will review the concept of how future trajectory-based operations will be accomplished as well as discuss the problems associated with current compatibility with today’s avionics as well as possible difficulties with an “extreme-implementation” of this concept. This paper contains Draft Recommendations for Committee B to consider.
Introduction
1.1 Gate-to-gate 4D flight planning begins with the airspace user requesting the preferred 4D trajectory. The trajectory is modified to avoid closed airspace and bad weather and to maintain the required distance between all aircraft. This number of deviations must be as few and as small as possible. The controller can then establish times at which the aircraft will have to pass certain points along the flight in order to ensure that two trajectories do not cross, or to establish flow control along a route. As a consequence the most efficient route for both the aircraft and Air Traffic Management can be used for every individual aircraft.
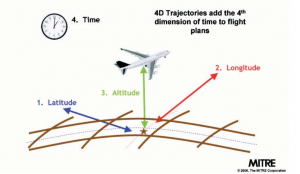
1.2 The combination of a standard three-dimensional route consisting of lateral, longitudinal and vertical guidance combined with time constraints is called a 4D-trajectory.
1.3 4D trajectory management is the ability to manage an aircraft’s trajectory through each phase of flight ensuring that Air Traffic Management (ATM) resources are safely and efficiently used. A 4D contract is an agreement to follow a given 4D trajectory to reduce ambiguity of the aircraft position in time and space and so maximize available ATM resources for all users. Using computers and digital communication they can exchange several trajectories until both parties are satisfied. This process is called trajectory negotiation. Pre-Defined trajectory procedures such as SIDS (Standard Instrument Departures) and STARS (Standard Arrival Routes) that contain trajectory information can be incorporated into a 4-D trajectory contract. Once the negotiation is completed, the pilot is responsible to comply with the 4D trajectory “contract”. Amendments to the contract are possible on request of the pilot or controller for any part of the flight. Automated tools provide pilot and controller with a visualization of an aircraft’s 4D- trajectory and allow these users to obtain more trajectories and are automatically communicated and negotiated between the ground systems such as the FAA’s 4D En- route Descent Advisor (4D-EDA) and the aircraft involved via digital methods (datalink). The FAA 4D EDA is a national airspace optimizer scheduling engine. 4D trajectory management will take into account airspace, traffic, airport and weather information and is able to handle 4D trajectory contract requests dynamically. All advanced tools work on the basis of these 4D-trajectories.
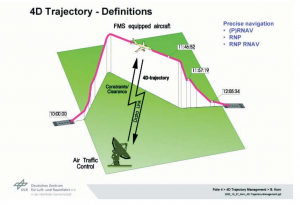
Note: Although RNP RNAV is shown in the diagram above, this term has been superseded and no longer exits.
Discussion
2.1 Departure planning for a 4D trajectory flight will include surface trajectory negotiations. This will ensure the most efficient taxi and departure staging that will allow aircraft to meet their Required Time of Departure (RTD) which is part of the initial 4D trajectory contract. Because of the uncertainty of the actual departure time, the pre-departure contract, along with any last minute central flow management is infused with the pre- loaded 4D route entered into the airspace optimizer and the negotiated contract is exchanged based on a short future timeline, usually 30 minutes. An optimal departure phase of a 4D flight consists of a normal departure whose routing has been designed for a continuous climb to altitude at the aircraft’s optimum climb speed. Once the transition through complex departure airspace has occurred, the aircraft enters the en- route portion of it flight.
2.2 The en-route phase of a 4D flight consists of aircraft receiving any re-negotiated trajectory contracts from Air Traffic Control (ATC) due to sector planning/conflicts or pilot initiated trajectory re-negotiations if flight performance is less than optimal or to increase flight efficiency/performance. En-route changes initiated by ATC may occur in order to balance the traffic load or reduce complexity that is forecast to occur in sectors along the aircraft’s route.
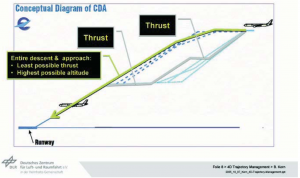
2.3 The approach phase of the 4D flight should ultimately end with a 4D-trajectory enabled Continuous Descent Approach (CDA). These approaches utilize the highest possible altitude, clean configuration and least possible thrust throughout the descent. Often referred to as “green approaches”, a CDA is environmentally friendly as it drastically reduces the amount of CO2 and NOx that is emitted in the approach phase of flight when compared to today’s “dive and drive” practice where aircraft are descended to a lower altitude, then have to proceed under thrust to the next point where the procedure is repeated. Additionally, the noise footprint of arrival aircraft is drastically reduced since aircraft will be routed over the same flight path using reduced thrust. This benefit alone will greatly assist airport planners that have to deal with the increasingly difficult issue of noise pollution during environmental impact studies.
2.4 Although the concept of 4D-trajectory appears to be the logical next step in performance based navigation, there will be some serious hurdles to overcome in order to realize the gains from this technology. Since 4-D trajectory flights are based on the ability to digitally negotiate flight plan contracts, all issues associated with the proper transmission and acknowledge receipt of data information must be completed before any implementation of 4D technologies. Reliable Data Link is required in order to implement ATM Trajectory Management.
2.5 Any application of this technology will have to be phased in since it will take many years to equip aircraft as well as ground stations with the technology needed for 4D trajectories. In fact, one of the greatest challenges will be how to incorporate 4D trajectories with legacy equipped aircraft so that the gains that are realized through gate to gate flight planning isn’t lost because ATC has to revert to the current way of vectors and speed control in order to mix both types of flights.
2.6 One concept currently under consideration that will allow 4D equipped aircraft to fly their flight planned CDA during this transition phase is to allocate certain types of aircraft to particular runways. The metering of traffic to runways designated to specifically equipped aircraft may actually provide the incentive for aircraft operators to upgrade to 4D compliant avionics. However, the complexity that this mixed mode of operation creates in the air traffic system is undesirable. For this reason, TOC is of the opinion that a high equipage rate is crucial for a successful system wide implementation of 4D trajectory.
2.7 Since the participating 4D aircraft’s time of arrival over a fix can be controlled, intervals over an arrival fix can be tailored en route to allow non-participating flights to be vectored into the provided gaps on the arrival segment of a flight. Normally, multiple 4D- equipped aircraft would be able to negotiate or renegotiate with ground stations along their route of flight. During a mixed mode of 4D and non-4D equipped aircraft however, it is assumed that the 4D- EDA would take the position of the non compliant aircraft whether received from Automatic Dependent Surveillance – Broadcast (ADS-B), radar or other methods and use that as the basis to negotiate spacing contracts with 4D compliant aircraft. Since a 4D contract cannot be negotiated with a non-participating aircraft, the 4D-equipped aircraft will be required to meet specific time and altitude constraints that may not be operationally optimal due to the non-participating aircraft. In addition, the general complexity increases, as the air traffic management system has to mix these differently equipped aircraft. Following IFATCA policy (IFATCA Manual page 3 2 3 14) remains relevant in this context:
| “In addition to the individual safety case, a system safety analysis should be conducted at the introduction of each and every technology which results in mixed mode operations.The role of the controller as the mitigation must be considered in the context of the level of integration and, for safety assurance, capacity levels must be revised to maintain the required safety level.” |
2.8 Applications
2.8.1 Many countries and aircraft operators have already been testing and flying 4D-trajectory routes. Currently, all Airbus Industry aircraft and newer model Boeing aircraft are equipped with 4D compliant avionics. Most Flight Management Systems (FMS) however do not regard ATC requirements as “hard requirements.” Since 4D trajectory contracts require aircraft to comply with negotiated contracts, this issue must be solved.
2.8.2 Sweden
2.8.2.1 In 2001, Scandinavian Airlines (SAS) began Required Time of Arrival (RTA) trials flying 33 flights between Malmo, Stockholm and Lulea Sweden. SAS began the first application of providing 4D trajectory to ATC in 2005. During these flights, current aircraft state and trajectory predictions were made via ARINC 702A-1 trajectory bus that included aircraft current-state information, 4D predictions (each minute or when the flight plan changed), and full trajectory to the runway all including vertical waypoints and turns. Aircraft Communication Addressing and Reporting System (ACARS) messages were added for interim use in the flight trials. The aircraft that were used for these trials were B737 FMS with U10.6 software with a dedicated ARINC 429 bus (ARINC 429 = Mark 33 Digital Information Transfer System). They used ACARS downlink of trajectory intent information as interim data link.
2.8.2.2 To date, more than 650 green approaches have been flown by SAS resulting in:
- 204 Metric Ton CO2 reduction yearly
- 715 kg of NOx reduction yearly
- 130,000 kg fuel saved
These benefits were obtained operating in a mixed mode environment.
SAS estimates that 36,000 green approaches flow annually into Stockholm alone will save:
- $5.8M fuel reduction yearly
- 23,000 Metric Tons of CO2/year
- 79 Metric Tons of NOx/year
2.8.3 United States of America
2.8.3.1 The Federal Aviation Administration (FAA) in conjunction with National Aeronautics and Space Administration (NASA) and the Joint Planning & Development Office (JPDO) has planned basic 4D trajectory en-route tests for the fall of 2007. These tests will be conducted at the Cleveland Hopkins airport (KCLE). Aircraft will be using Smiths FMS with VHF Datalink 2 (VDL-2) radio with interface to FMS. Ground infrastructure will consist of:
- Real-time Cleveland ARTCC track and flight plan data, Rapid Updated Cycle (RUC) wind data feed
- NASA 4D-EDA
- VDL-2 ground datalink radio with interface to 4D-EDA
2.8.3.2 NASA’s 4D-EDA is a prototype based on the current EDA, which is a Center-TRACON (TRACON is Terminal Radar Approach Control) Automation System (CTAS) tool that assists controllers with metering arrival aircraft in transition from Center to TRACON airspace. EDA works in conjunction with the CTAS traffic management advisor, which generates the precise schedules and sequences that EDA targets for optimal throughput into the TRACON. EDA is capable of generating explicit “meet-time” manoeuvre advisories based on combinations of speed, altitude, and heading degrees of freedom. EDA provides automated conflict resolution by presenting advisories that are predicted to put aircraft on conflict-free trajectories to the metering fix. The current EDA’s decision-making time horizon however is only 25 minutes from the metering fix. The 4-D enabled EDA prototype will include software changes that allow greater predictability type as well as the ability to process and negotiate all the parameters required for a 4-D trajectory route. It will also incorporate advanced algorithms that allow a much further look into the future. Additionally, it has the ability to interface with VDL-2 ground datalink allowing the system to up- and downlink 4D contracts as well as wide-area wind and weather forecast information.
2.8.3.3 Currently in the USA, United Parcel Service (UPS) and Federal Express (FedEx) have been experimenting with RTA to a limited extent to their main hub airports during the midnight shift using ACARS as the method for transmitting RTA data. UPS began testing additional software known as Flight Deck Merging and Spacing (FDMS) and Airline Based En-route Sequencing and Spacing (ABESS) in August of 2007.
2.8.3.4 FDMS is an airborne application that generates speed guidance for the flight crew. This is accomplished using position, speed and other data provided by ADS-B from both the lead and trail aircraft to generate speed guidance for the trail aircraft. The crew inputs the data provided by ADS-B into the FDMS and the system generates required speed and time information. By following the speed guidance from a display in the crew’s forward field of view, the aircraft will merge into a common terminal arrival stream. Additionally, this application allows the aircraft to maintain time spacing with a designated lead aircraft from the en route environment to the runway.
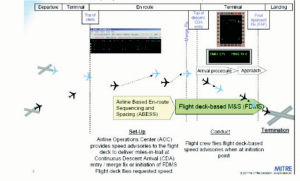
2.8.3.5 ABESS was devised by Massachusetts Institute for Technology, Research and Engineering (MITRE), NASA, the FAA and UPS. ABESS aligns aircraft for optimized flow to the destination airport. The Air Operations Center (AOC) analyzes inbound company aircraft based on their flight routing and speed, and determines a scheduled time over a common waypoint. After the aircraft have departed their origin and have reached their cruise altitude, the AOC will provide speed advisories via CPDLC (as necessary) to space flights for optimized arrival flows to a predetermined merge point. For those aircraft equipped with FDMS, once the trail aircraft is in ADS-B range of the lead aircraft, the trail aircraft will commence the FDMS operation to the specified time spacing interval.
The illustration below displays the ABESS/FDMS process:
2.8.3.6 The ultimate goal of the abovementioned tools is to have the aircraft arrive with the proper spacing over an arrival fix that will allow them to fly a CDA to the runway. UPS plans to have almost all their aircraft equipped with FDMS tools by late 2009 or early 2010. Although ABESS will be used specifically by the airline, a transition will occur following successful tests to move the sequencing and spacing task to the FAA. Currently, the FAA and National Air Traffic Controllers Association (NATCA) have started the process to move the ABESS functionality to the flow control traffic management advisory systems. Once this system has successfully been transferred to the FAA’s Traffic Management, they will be able to use this tool to meter traffic so that aircraft will be in trail and allow the most economical and efficient approach requiring minimum controller corrections to touchdown.
2.8.3.7 United Airlines, Boeing and NASA have been testing Oceanic Tailored Arrivals (OTA) on oceanic flights into San Francisco (KSFO). Their goal during these tests was to enable CDA operations during complex, congested airspace conditions while maximizing throughput. This requires dynamic solutions that are adapted to the traffic/airspace situation. These tests are designed to support the long-term goals of Next Generation Air Transportation System (NGATS) by proving that 4-D Trajectory/CDA can be accomplished during heavy, complex traffic situations.
2.8.3.8 Initial tests were completed using Future Air Navigation System (FANS) equipped Boeing 777 flights on Central-East Pacific route structure. Datalink communications were provided through the FAA’s newly deployed Advanced Technologies & Oceanic Procedures (ATOP)/Ocean21 system at Oakland Center. Approximately 2 hours prior to arrival at KSFO, the flight crew downlinks intent to participate in OTA trials. The controller then modifies ADS-C reporting contract to capture data at 2-minute intervals. Controller then up-links basic OTA clearance via Data Link. The flight crew loads this clearance into the FMS and downlinks whether it is acceptable or not. Updated cruise/descent winds, based on Rapid Update Cycle (RUC) Weather from the National Oceanic & Atmospheric Administration (NOAA) are sent to AOC by the 4D-EDA test engineer for uplink and FMS auto-load. 4D contract is then established for the assigned metering time at the TRACON boundary. When the Oceanic sector hands off the aircraft to Oakland Center, Data Link services terminate and ATOP ADS contract is automatically terminated. Normal handling during the descent profile is established and the Northern California TRACON issues the CDA.
2.8.3.9 Although the initial oceanic field trials indicated that the concept is viable, it became obvious that the FAA’s 4D-EDA automation requires further algorithms and models for terminal airspace de-confliction. Additionally, the challenge is to be able to plan and execute CDA trajectories in congested traffic conditions along with legacy equipped aircraft. Discussion with controllers that participated in this trial stated that mixing the test aircraft with non-participating arrival traffic greatly increased the complexity of their sectors. It is important to note that this test in a mixed mode of operation was conducted in airspace that was not specifically designed for the OTA procedure. This alone could have caused the increase in complexity that the controllers encountered. More tests should be conducted using airspace and procedures specifically designed for the procedure.
2.8.4 Australia
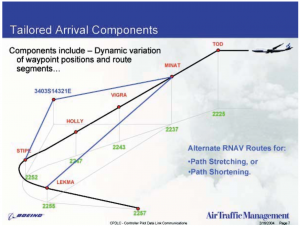
2.8.4.1 Australia began testing tailored Arrivals in April of 2004 with A330 flights into Melbourne and Sydney. The goal of the initial project was to investigate a method of delivering an arrivals clearance to an aircraft via Data Link that enabled the aircraft to meet a specific time at and entry fix, while maintaining the optimum arrivals configuration for as long as possible, thereby minimizing fuel burn, noise and emissions.
2.8.4.2 Components of the tailored arrival include dynamic variation of waypoint positions and route segments as well as dynamic assignment of altitude and speed constraints.
2.8.4.3 Phase one of the trial was specifically focused on testing the data link interfaces between the ground system and the Boeing and Airbus airborne systems. Two important issues that surfaced during the test were the naming convention used by the various companies in the naming of the arrival procedures in the onboard navigation databases (for one of the Melbourne arrivals there were four different names across the airborne and ground systems for the same procedure), and one of the uplink CPDLC clearance messages is processed differently by the Airbus, Boeing and United States Air Force implementations, meaning that the ground system has three airborne variations for the same uplink message.
2.8.4.4 Another issue that was discovered appeared to be specific to the B747-400. Whenever an additional speed constraint was added to the uplink clearance, the B747 Flight Management Computer (FMC) changed back to economy mode and replaced crew- entered speeds in the descent path by Boeing default speeds.
2.8.4.5 According to Airservices Australia, the most surprising finding was the accuracy of the FMC time predictions. In one case the aircraft crossed a specified waypoint two seconds later than the prediction made 40 minutes earlier while cruising at FL390, and overall the accuracy appeared to fall within +/- ten seconds of the predicted time.
2.8.4.6 Phase two was conducted in early 2007 with the primary focus being to determine the aircraft FMC’s ability to meet required time of arrivals that the FMC itself has predicted without pilot or ATC intervention. These results will determine to what extent the FMC data transfer can be used to accurately sequence aircraft to the runway.
2.8.4.7 During this phase it was essential that the test aircraft be flown in exactly the same way each time so that variations in flying technique did not influence the data being collected. ATC was requested not to intervene with the arrival unless operationally necessary. This proved difficult due to the test being conducted in airspace not specifically designed for these type of arrivals as well as operating in a mixed mode environment. Results of these tests are still pending.
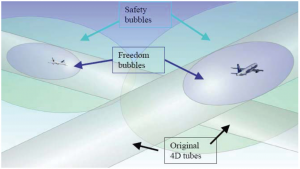
2.9 During the March 2007 ICAO worldwide symposium on performance of the air navigation system, the International Federation of Airlines Pilots Associations’ (IFALPA) presented its view of a future 4D environment. One of their major concerns is that an extreme implementation of 4D trajectory, such as exact speeds, tracks and RTA(s) are unreasonable from an operational perspective. There is no room to deal with issues such as speed reductions due to turbulence or slight deviations due to weather along the route. Temporary speed changes, for example, would require a renegotiated contract with ATC. IFALPA recommends that instead of exact time and speed contracts, a kind of “Breathing” compliance or bubble of airspace be used when negotiating 4D routes. These “Freedom Bubbles” would allow aircraft to make reasonable trajectory changes and speed modifications without negotiating a new contract. The ATM software would plan for the separation of the protected bubbles and uplink the appropriate 4D clearance. This protected “bubble” of airspace would also allow for an implementation of Strategic Lateral Offset Procedures (Separation from other traffic would actually be computed by the 4D-EDA by using outer “safety bubbles” that surround the operational bubble).
2.10 This concept has been called “Freedom-of-Flight Tolerances” by IFATCA in their Statement on the Future of Global ATM. ICAO does not yet have a specific name, but the ICAO Doc 9854 Global Air Traffic Management Operational Concept does include references such as:
“this trajectory will be approved with tolerances” and “the intent of these tolerances…is to allow some freedom for changes…without further reference to the service provider.”
2.11 In the USA, the FAA is planning on a three-step evolution for data communication.
Segment 1 of its NGATS timeline is slated for 2010 that will include:
- Initial 4D trajectory management
- En route clearances & Traffic Flow Management (TFM) re-routes
- Revised departure clearances
Segment 2 in 2017 begins mandatory equipage and includes:
- Initial 4D agreements
- Conformance management
- TRACON data-comm clearances including 4-D CDA, Controlled-Time of Arrival (CTA)
Widespread 4D agreements and data automation hopefully will be in place by 2025. The FAA’s initial investment decision is planned for June 2008 with initial services in tower and en route planned for 2012-2014.
2.12 Single European Sky ATM Research (SESAR) timeline for the proposed evolution of 4D Trajectory technology is about the same with the definition phase being completed by 2008. The Development phase is scheduled between 2008-2013 with the final Deployment phase implemented between 2014-2020.
Conclusions
3.1 4D trajectory management is already in limited operational use.
3.2 4D Trajectory is a key concept for ICAO, USA’s NGATS as well as Europe’s SESAR. Additionally, 4D Trajectories are being included in other country’s future ATM designs. Although there are different technologies and 4D ATM tools in development, for the most part the concept and proposed application of 4D trajectories is the same.
3.3 Reliable datalink is required in order to implement ATM Trajectory Management.
3.4 It is possible to implement 4D Trajectory Management in current airspace. However in order to realise all the potential gains of a 4D ATM environment, airspace will have to be comprehensively redesigned.
3.5 TOC is of the opinion that a high equipage rate is crucial for a successful system wide implementation of 4D trajectory.
3.6 One of the issues to be resolved is the FMS must regard ATC requirements as hard requirements.
Recommendations
It is recommended that;
4.1. IFATCA Provisional Policy is:
The flight management system shall accept ATC requirements as compulsory requirements.
and is included in the IFATCA Manual on page 3 2 3 18.
4.2 IFATCA Provisional Policy is:
Airspace must be designed to support 4D trajectory management.
and is included in the IFATCA Manual on page 3 2 3 18.
References
Towards an Operational Concept for Integrated Adaptive and Predictive ATM, Rudi Ehrmanntraut, EUROCONTROL, Experimental Centre (EEC), Bretigny sur Orge, France.
A PHARE concept in support of a European ATM Programme, H.W.G. de Jonge, NLR-TP- 99068, National Aerospace Laboratory NLR.
Integrated Next Generation Air Traffic Control Operations Concepts (May 2007).
Tailored Oceanic Arrivals, UC Aviation Environmental Symposium (March 2007), Rich Coppenbarger, NASA Ames research Center.
Automated Arrival Traffic Flow Management Using 4D Trajectories, Dave Schleicher, Sensis Corporation.
NGATS ATM Enterprise Architecture, Joint Planning & Development Office, Crown Consulting (April 2005).
Co-Operative Air Traffic Management, Medium Term Concept of Operations, C-ATM consortium, European Commission.
Refined Flow Management: An Operational concept for Gate-Gate 4D flight planning. NLR-TP-2002-057, H.W.G. de Jonge, National Aerospace Laboratory LTR.
Defining 7 Solution Sets, Data Comunications, Jim Eck, FAA (March 2007).
Green Approaches: 4D-Trajectory Enabled Continuous Descent Approches, Keith Wichman, Smiths Aerospace, (January 2007).
4D Trajectory Management in the Extended TMA, Bernd Korn, Alexander Kuenz, Hartmut Helmke, DLR-Institute of Flight Guidance, Braunschweig, Germany, (October 2005).
The Challenge, ICAO Worldwide Symposium on Performance of the Air Navigation System, Montreal (March 2007) IFALPA.
Transition Plan for the Implementation of the Navigation Strategy in ECAC.
Tailored Arrivals- Phase One Report to ISPACG (ISPACG 19-IP02).
Tailored Arrivals Trial 2004 Boeing ATM/Air Traffic Alliance/Quantas/Airservices Australia.
ICAO Doc 9854 Global Air Traffic Management Operational Concept.
Statement on the future of global ATM by IFATCA. February 2007.

