
DISCLAIMER
The draft recommendations contained herein were preliminary drafts submitted for discussion purposes only and do not constitute final determinations. They have been subject to modification, substitution, or rejection and may not reflect the adopted positions of IFATCA. For the most current version of all official policies, including the identification of any documents that have been superseded or amended, please refer to the IFATCA Technical and Professional Manual (TPM).
53RD ANNUAL CONFERENCE, Gran Canaria, Spain, 5-9 May 2014WP No. 87Study Space-Based Automatic Dependent Surveillance – BroadcastPresented by TOC |
Summary
Aireon LLC proposes to use satellites to relay Automatic Dependent Surveillance – Broadcast (ADS- B) data from suitably equipped aircraft to Air Traffic Service Units (ATSUs) and provide surveillance coverage in what the consortium calls ‘near real-time’ across 100% of the world’s airspace.
This provision of new surveillance data raises questions as to how the data will be used to provide separation and other ATS functions, as well as the usefulness of the data in improving safety and efficiency of flights in those portions of oceanic and remote continental airspace where there is currently no surveillance information available to controllers.
Also of importance is the extent to which the proposed system will meet existing or developing ICAO standards for communication, navigation and surveillance as ICAO moves from system based to performance based standards.
Introduction
1.1 Automatic Dependent Surveillance – Broadcast (ADS-B) technology is achieving widespread implementation in many parts of the world including Australia, Canada and the United States. ADS-B can be used to provide radar-like ATS surveillance services including surveillance separation minima and safety net alerting functions to ADS-B equipped aircraft.
1.2 An ATS surveillance service using ADS-B is traditionally provided by a network of ADS- B ground stations. The network of ground stations receives position, level and some other information from ADS-B equipped aircraft and sends the data to the Air Traffic Services Unit (ATSU) for display to the controller. Like radar, an ATS surveillance service using ADS-B is limited to aircraft within line of sight of the ADS-B ground station network.
1.3 Aireon LLC (Aireon) is a joint venture consortium formed with the aim of providing global ADS-B coverage. Aireon will use ADS-B receivers mounted on board the satellites of the Iridium NEXT satellite constellation; Aireon hopes to sell this ADS-B surveillance data to Air Navigation Service Providers (ANSPs) around the world. Equity investors in Aireon are:
- NAV CANADA;
- Iridium;
- Enav of Italy;
- Irish Aviation Authority; and
- Navair of Denmark.
1.4 Aireon is working with Harris Corp. and Exelis Corp. for the provision of the space- and ground-based equipment in the system as well as the US Federal Aviation Administration (FAA) for technical data and analysis; the FAA could be an important customer of Aireon given the large area of oceanic airspace for which it is responsible.
1.5 The provision of ADS-B surveillance coverage in what is currently procedural airspace provides an opportunity for improvements in safety and efficiency; however, many questions are raised including:
- the implications of using satellites instead of ground stations to collect the ADS-B data;
- whether the system is capable of being used as an ATS surveillance system;
- what the benefits for controllers and pilots will be;
- the implications for controllers when surveillance data is provided to large areas of airspace that are currently procedural, including mixed mode operations
- whether the Aireon system is capable of meeting existing and developing ICAO performance based standards; and
- the implications of ANSPs relying on external providers for the provision of surveillance data that may become integral to their service provision.
1.6 IFATCA policy regarding the development of new automated systems is (AAS 1.13):
Operational controllers shall be involved in the design, development and implementation of new ATM systems. Their role should include:
|
Discussion
2.1 Methods of determining aircraft position
2.1.1 The determination of aircraft position is essential to the provision of an air traffic service (ATS). Where the provision of ATS is reliant on pilots reporting position verbally or electronically, aircraft must be separated by large distances to account for uncertainty of position and delay in delivery. An ATS surveillance system allows for a more efficient use of airspace through more certainty of position, reduced separation minima and flexibility in tracking.
2.1.2 The ICAO Aeronautical Surveillance Manual (Doc 9924) details the various types of ATS surveillance systems in common use today and a brief comparison of these ATS surveillance systems is provided in Attachment A; they are:
- primary surveillance radar (PSR);
- secondary surveillance radar (SSR) including Mode S;
- multilateration; and
- ADS-B.
2.1.3 Oceanic and remote continental airspace outside ATS surveillance system coverage may be supplemented with Automatic Dependent Surveillance – Contract (ADS-C); it is important to note that ADS-C is very different to ADS-B. ADS-C is used to facilitate the application of procedural separation – it is not an ATS surveillance system and can not be used to provide surveillance separation minima between aircraft.
2.2 Concept of space-based ADS-B
2.2.1 The concept of space-based ADS-B differs from existing ATS surveillance systems in that it uses receivers mounted on satellites, rather than ground stations, to collect aircraft position information (see Figure 1 (Space Based ADS-B)). The data is then relayed from the satellite network to ground stations (only one ground station is required; however, two ground stations are planned in order to provide redundancy) before transmission to the ATSU.
2.2.2 The concept of space-based ADS-B has been recognised by ICAO and the following was adopted at the ICAO Twelfth Air Navigation Conference in 2012:
Recommendation 1/9, that ICAO:
a) support the inclusion in the Global Air Navigation Plan, development and adoption of space-based ADS-B surveillance as a surveillance enabler;
b) develop Standards and Recommended Practices (SARPS) and guidance material to support space-based ADS-B as appropriate; and
c) facilitate needed interactions among stakeholders, if necessary, to support this technology.
2.2.3 The Aireon space-based ADS-B system will use 1090 MHz ADS-B receivers mounted on the satellites of the Iridium NEXT satellite constellation. Iridium NEXT is a network of communication satellites that will be progressively commissioned from 2015 and will replace the existing Iridium satellite network.
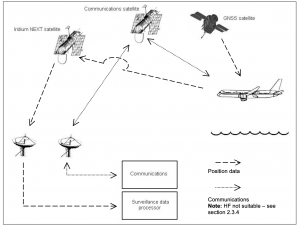
Figure 1 – (Space Based ADS-B)
2.2.4 The Iridium NEXT constellation will consist of 66 satellites in a polar low earth orbit (orbiting at approximately 90° to the equator at an altitude of approximately 800 km). The satellites will be distributed between 6 orbital planes (11 satellites in each plane) at 30° intervals around the globe (see Figure 2). To an observer on the ground each satellite will appear to move in a north- or south-westerly direction.
2.2.5 The Aireon space-based ADS-B system is intended for a gradual implementation starting in the NAT airspace in 2017, leading to complete coverage by 2018-19.
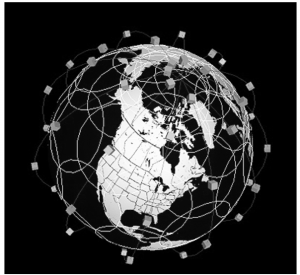
Figure 2 – Source: satnews.com
2.3 Potential for space-based ADS-B to allow ATS surveillance separation
2.3.1 The Aireon system is proposed to be suitable for the application of surveillance separation minima. When determining the suitability of space-based ADS-B for the application of surveillance separation, the most important considerations are:
- surveillance performance; and
- communication performance.
2.3.2 Surveillance performance
2.3.2.1 The Aireon system specifications call for the relaying of ADS-B information from aircraft to ATSU in what Aireon calls ‘near real time’ – providing an updated position to the controller every 15 s; however, what frequency of reports is ultimately achievable is still subject to confirmation once the first Iridium NEXT satellites are in operation.
2.3.2.2 An update rate of 15 s is less frequent than that for most ATS surveillance systems, which update at rates of between 3 and 12s. Consider a jet travelling at 480 kt: the jet would travel 2 NM during the 15 s period of one update of space-based ADS-B display. By comparison, the jet would travel 0.67 NM during a 5 s period of update of a terrestrial ADS-B display.
2.3.2.3 In order to predict the implications of this reduced reporting rate on separation, Aireon is conducting studies into how reliably ADS-B velocity data predicts aircraft position over the period of a 15 s report. In addition, NAV CANADA and Aireon are artificially degrading some existing ADS-B coverage to analyse the implications of a reduced reporting rate on the controller.
2.3.2.4 The latency of the reports must also be considered i.e. how old is the position information that is provided to the controllers every 15 s? In the Australian ADS-B system, the ATSU checks the time stamp of an ADS-B report and rejects any report that is more than 3 s old; however, most reports are no more than 1-2 s old. Aireon expects that the latency of reports in its space-based ADS-B will also be around 1-2 s. This reporting rate is comparable to the Australian ADS-B system as well as most other ATS surveillance systems that transmit data from ground station to ATSU via satellite links.
2.3.2.5 Because the ADS-B receivers are moving relative to a fixed point on the earth, some characteristics of ground stations will present to the controller in a different manner. The ICAO Separation and Airspace Safety Panel (SASP) has noted that if there are cones of ambiguity below each satellite, this could result in moving areas of surveillance holes.
2.3.2.6 A failure of the ADS-B receiver on board a satellite or a collision between satellites could result in an unexpected loss of surveillance coverage provided to controllers. How much (if any) coverage is lost in the event of such a failure will depend on the extent of overlapping coverage. Any loss of coverage would move across the earth in a north westerly or south westerly direction until the equipment could be repaired or a spare satellite could be moved into place.
2.3.2.7 Aireon is continuing to study the coverage that will be provided by the ADS-B receiver on each satellite and although the coverage will only be truly known once the complete constellation is in orbit, Aireon believes that the coverage provided by each receiver will be much larger than initially thought as a result of actual versus specified transponder output and design improvements to the ADS-B receiver on board the satellites. Aireon is using other satellite launches to model the potential effects of a loss of surveillance.
2.3.2.8 The Aireon system will provide global coverage, including in areas where ANSPs have already established terrestrial surveillance. Each ADS-B receiver in the Aireon system will be limited to distinguishing 1,000 individual ADS-B signals at once so it may not be a suitable replacement or contingency for existing surveillance in high density airspace. Aireon continues to study the issue of overwhelming of the system and the effects of false replies unsynchronised in time (FRUIT).
2.3.3 Communication performance
2.3.3.1 The use of satellites to provide surveillance coverage will be most advantageous in oceanic and remote continental areas where the installation and maintenance of communication ground stations is difficult or impossible; therefore, it is likely that this technology will be most advantageous in areas outside of VHF coverage.
2.3.3.2 ICAO PANS-ATM provides that:
8.3.2 Direct pilot-controller communications (DCPC) shall be established prior to the provision of ATS surveillance services, unless special circumstances, such as emergencies, dictate otherwise.
2.3.3.3 Aireon is currently conducting trials using CPDLC as the sole means of establishing Direct controller-pilot communications (DCPC) for the application of ATS surveillance system separation minima (with VHF available as a backup during the trials). The results of these early trials have encouraged Aireon to expect that CPDLC can be safely relied upon as the sole means of DCPC to support the application of a 15 NM horizontal ATS surveillance separation minimum.
2.3.3.4 It has been proposed that current collision risk modelling could be performed assuming satellite voice as a back-up communication medium to CPDLC and Aireon is exploring ways to improve the utility of satellite voice with a focus on minimising the time required for a controller to establish contact with the pilot.
2.3.3.5 PANS-ATM currently only prescribes 2.5, 3 and 5 NM horizontal separation standards for use by ATS surveillance systems. Aireon claims that the application of separation larger than 5 NM should not be viewed as a new ATS surveillance separation minimum and instead, when aircraft are under space-based ADS-B surveillance and DCPC exists, the controller will apply at least the minimum specified in PANS-ATM, or a larger distance depending on the communication medium in use.
2.3.3.6 The Manual on Required Communication Performance (RCP) (ICAO Doc 9689) defines communication performance – the length of time taken to perform a communication transaction and what separation minima each level of performance can support; the Manual on RCP specifies RCP 10 as the required communication performance standard for the application of 5 NM separation minima. It is unlikely that RCP 10 can be achieved through the use of CPDLC or satellite voice. RCP 120 is prescribed for the application of 15 NM horizontal separation minima; therefore, where the conditions of RCP 120 can be met, Aireon’s goal of 15 NM ATS surveillance separation may be possible.
2.3.3.7 Given there is no proposal for amendments to PANS-ATM at this stage, the requirement for DCPC will preclude the use of space-based ADS-B for the provision of ATS surveillance services in areas where HF voice is used as the primary means of communication.
2.3.4 The ICAO Global Air Navigation Plan (Doc 9750) identifies the transition of ATM from system based requirements to performance based requirements that are technology- independent. It is not yet known whether the Aireon system will prove capable of complying with ICAO performance based standards for surveillance, which would allow for the application of technology-independent separation minima.
2.4 Implications for controllers
2.4.1 Where aircraft are not able to meet the surveillance or communication performance requirements to allow ATS surveillance system separation, the introduction of space- based ADS-B may introduce, or increase the complexity of, existing mixed mode operations. Controllers may be expected to apply surveillance and procedural separation at once in a single airspace if there is no mandate for ADS-B or CPDLC equipage.
2.4.2 IFATCA policy in relation to mixed mode operations is (ATS 3.14):
| Efforts should be undertaken to reduce existing Mixed Mode Operations by creating intrinsically safe solutions.Introductions of new Mixed Mode Operations should be avoided by creating intrinsically safe solutions.
When safety of a Mixed Mode Operation cannot be completely managed at an intrinsic level, assessment must take place that the change in the ATM system does not increase controller workload to an unacceptable level. |
2.4.3 The types of sectors that will benefit most from space-based ADS-B are likely to be oceanic and remote continental sectors – these sectors are traditionally larger than surveillance sectors due to the more dispersed traffic disposition. It is unlikely to be feasible for controllers to monitor a number of surveillance separation standards close to the minimum on large screen ranges and over the long period of time that aircraft typically spend in these sectors without assistance from technology such as medium term conflict detection.
2.4.4 In the Australian experience of introducing terrestrial ADS-B surveillance to large, formerly procedural remote continental sectors with a screen range of ~2000 NM and only a short term conflict alert, it has been found to be impractical to monitor ATS surveillance separation minima for an extended period of time when those aircraft are closer than ~20 NM. In this case, the procedural longitudinal separation standard used in Australia for most of these aircraft is also 20 NM and therefore while the benefits of the increased flexibility of an ATS surveillance service are realised with regards to flexible tracking, vectoring to achieve separation and removing the need for pilot distance reports, there has been little reduction in the longitudinal separation actually applied between aircraft.
2.4.5 ICAO PANS-ATM requires that:
8.7.2.7 In no circumstances shall the edges of the position indications touch or overlap unless vertical separation is applied between the aircraft concerned, irrespective of the type of position indication displayed and separation minimum.
2.4.6 Again using the Australian experience, although the separation minimum that may apply is 5 NM, when a large screen range is used, surveillance separation may not normally be used for crossing or opposite direction aircraft until the aircraft are separated by ~15 NM due to the requirements of PANS-ATM 8.7.2.7. The procedural separation minima in this case is 15 NM – the separation minima that is actually applied is no less than the existing procedural minimum; however, while the distance is no less, the increased flexibility of surveillance provides increased flexibility and a reduction in communication.
2.4.7 An aircraft that is equipped with ADS-B but no means of establishing DCPC would still be visible to controllers. Although such an aircraft may not be eligible for the application of surveillance separation, the automated provision of position information would assist controllers with the application of procedural separation standards i.e. no need for voice reports of position or distance information.
2.4.8 A lack of surveillance precludes the provision of safety net functions of surveillance such as:
- route adherence monitoring (RAM);
- cleared level adherence Monitoring (CLAM);
- minimum Safe altitude warning (MSAW); and
- short term conflict alerting (STCA).
The provision of surveillance data to controllers provides an opportunity to increase safety through the provision of these safety net functions even if an aircraft is not eligible for the application of surveillance separation. Additionally, the Aireon system will be capable of relaying all ADS-B information from the aircraft to the ATSU, so it will be possible to provide controllers with additional safety features such as emergency squitter.
2.5 Potential for improvements in efficiency from space-based ADS-B
2.5.1 A study commissioned by Aireon predicts fuel savings of US$6-8 billion for airlines from 2018-2030 in the North Atlantic airspace assuming the system is suitable for the application of 15 NM surveillance separation minima.
2.5.2 Studies by Aireon have found that approximately 88% of aircraft operating in the Gander and Shanwick FIRs are already ADS-B equipped. ADS-B mandates, such as the Upper Airspace Mandate implemented in Australia in December 2013 will encourage further equipage of ADS-B by aircraft operators and Aireon notes that where operators have been encouraged or required to equip their aircraft with ADS-B, savings expected from space-based ADS-B will provide a return on an investment already committed by the operators.
2.5.3 The Asia and Pacific Initiative to Reduce Emissions (ASPIRE) 2011 Annual Report contains an analysis of the incremental improvement in fuel burn that would be achieved from a reduction in separation minima in the Pacific Ocean region. The analysis was conducted at current traffic levels, double current traffic levels and triple current traffic levels and considered longitudinal and lateral separation reduced from 30 NM to 25 NM, 20 NM, 15 NM, 10 NM and 5 NM on both non-optimised routes i.e. fixed routes, and user-preferred routes (UPRs) optimised for wind.
2.5.4 The analysis by ASPIRE found that if 15 NM separation minima were implemented on non-optimised air routes in the Pacific Ocean region, it would result in a fuel burn reduction of 0.18% at current traffic levels, 0.30% at double the current traffic levels and 0.39% at triple the current traffic levels when compared to 30 NM separation. When the same analysis looked at UPRs optimised for wind there was a 0.00% reduction at current traffic levels with results of a similar magnitude for double and triple current traffic levels.

Table 1 (Adapted from 2011 ASPIRE Annual Report)
2.5.5 By way of comparison, the introduction of RVSM in the Pacific Ocean region provided a 0.3% gain in efficiency and the reduction from 50 NM to 30 NM separation minima provided a further 0.3% gain in efficiency. Considering an oceanic sector in the Pacific Ocean region where aircraft are constrained to fixed routes, the introduction of a 15 NM separation minima can be seen to provide similar gains in efficiency given similar or increased traffic levels.
2.5.6 While the proposed Aireon system proposes to allow the implementation of 15 NM separation minima, progress has already been made in reduced separation minima in oceanic airspace using other technologies.
2.5.7 Progress continues to be made worldwide with implementation of reduced separation standards with required navigation performance (RNP) using ADS-C and CPDLC. PANS-ATM currently provides 30 NM and 50 NM lateral and longitudinal separation standards using RNP 4 and RNAV 10 respectively, in addition to the traditional 10 and 15 minutes longitudinal separation. The NAT is close to implementing 5 minutes longitudinal separation and the SASP is studying the feasibility of 20 NM lateral and longitudinal separation standards using RNP 4 and an increased ADS-C reporting rate.
2.5.8 In addition to separation standards using RNP and CPDLC, ADS-B In-Trail Procedure (ITP) using 15 NM longitudinal separation minima has been trialled in the North Pacific and will be introduced to PANS-ATM in 2014. IFATCA has accepted the proposal of ICAO State Letter AN 13/2.5-13/34 for the use of ADS-B ITP and IFATCA provisional policy on the subject of ITP is (ATS 3.26):
| When using ADS-B ITP, proper mitigation must be in place to account for misidentification by the pilot due to incorrect input of Flight ID. |
2.5.9 Given these improvements in technology and reductions in procedural separation minima, there may be some environments where space-based ADS-B provides limited economic benefit such as low density airspace where aircraft already fly UPRs. However, even if the economic benefit is limited in some instances, the introduction of space-based ADS-B to any procedural environment would still provide the improvements in safety net alerting and increased flexibility in tracking.
Conclusions
3.1 Automatic Dependent Surveillance – Broadcast (ADS-B) is achieving widespread implementation throughout the world and may be used by controllers to provide radar- like services. Existing terrestrial ADS-B systems behave in much the same way as radar and are limited to within line of sight of the ground stations.
3.2 Space-based ADS-B uses satellites to collect the ADS-B information and relay it to the Air Traffic Services Unit (ATSU). The Aireon space-based ADS-B system aims to provide 100% global coverage and this will see surveillance in many oceanic and remote continental sectors that are currently without surveillance. An introduction of surveillance to procedural airspace has the potential to provide many safety and efficiency benefits.
3.3 The PANS-ATM requirement of direct controller-pilot communications (DCPC) in order to provide surveillance separation may require that controller-pilot data link communications (CPDLC) are the primary means of communication when applying surveillance separation, with satellite voice as a backup.
3.4 Aireon claims that the use of CPDLC for communications will allow a surveillance separation standard of 15 NM to be applied safely. Although PANS-ATM does not specify a 15 NM separation minimum, Aireon claims that the application of a 15 NM surveillance separation minimum will be permissible without amendment to PANS-ATM.
3.5 It is not yet known whether the Aireon system will prove capable of complying with ICAO required surveillance performance standards.
3.6 Where the system is not suitable for the provision of surveillance separation, controllers would still benefit from safety net alerts and the use of ADS-B to apply procedural separation.
Recommendations
It is recommended that:
4.1 IFATCA Policy is:
IFATCA supports the development of new surveillance technology that is designed to meet required surveillance performance standards, which allow for the application of technology-independent separation minima.
and is included in the IFxATCA Technical and Professional Manual.
References
ICAO Annex 11 to the Convention on International Civil Aviation – Air Traffic Services.
ICAO Doc 4444 ATM/501 Procedures for Air Navigation Services – Air Traffic Management.
ICAO Doc 9750 AN/963 Global Air Navigation Plan.
ICAO Doc 9869 AN/462 Manual on Required Communication Performance.
ICAO Doc 9924 AN/474 Aeronautical Surveillance Manual.
ICAO Doc 10007 AN-Conf/12 Twelfth Air Navigation Conference – Report.
ICAO Global Operational Data Link Document.
ICAO Circular 326 AN/188 Assessment of ADS-B and Multilateration.
ICAO SASP-WG/WHL/23 Summary of Discussions.
IFATCA Technical & Professional Manual 2013.
Information Paper CPWG/15, 13 May 2013.
Working Paper ACP WGF28/WP-02, 11 March 2013.
Working Paper A38 WP/132, 22 August 2013.
Working Paper A38 WP/364, 24 September 2013.
Working Paper SASP-WG/WHL/23-WP/11, 28 October 2013.
2011 Asia and Pacific Initiative to Reduce Emissions (ASPIRE) Annual Report.
Attachment A – Comparing methods of determination of aircraft position
6.1 The determination of aircraft position is essential to the provision of ATS. Where ATS is reliant on pilots reporting position verbally, aircraft have to be separated by large distances – procedural separation standards – to account for uncertainty of position and delay in delivery. An ATS surveillance system allows for a more efficient use of airspace through more certainty of position, reduced separation minima – surveillance separation standards – and flexibility in tracking.
6.2 ICAO Doc 9924 Aeronautical Surveillance Manual details the various types of ATS surveillance system in common use.
6.2.1 Primary Surveillance Radar (PSR) transmits a high power signal some of which is reflected by the aircraft back to the radar and this reflection is used to determine the position of the aircraft. PSR does not provide the identity or the altitude of the aircraft; however, PSR does not require any specific equipment to be installed on the aircraft in order for the ATSU to determine the position of the aircraft using surveillance.
6.2.2 Secondary Surveillance Radar (SSR) transmits a medium power signal that interrogates a transponder installed on the aircraft. In response to the interrogation, the transponder transmits a reply to the SSR including an identification squawk code (Mode A) and altitude (Mode C) which, when combined with the SSR antenna’s direction finding, determines aircraft position. SSR will detect only an aircraft fitted with a functioning transponder.
6.2.3 An additional function of SSR is Mode S. Mode S transponders use data link to transmit aircraft parameters such as flight identification, heading, track, bank angle and selected altitude to the ATSU.
6.2.4 Multilateration is a system that uses transponder signals to calculate aircraft position. The system can be considered as being like radar in that it provides target positions the same as SSR but it measures the aircraft’s position using the time difference of arrival of the transponder reply using a number of receivers consisting of antennas positioned within a coverage area to calculate the position of the aircraft using differences in the runtime of transponder responses. Replies from the airborne transponder are received either by SSR or by an interrogation unit that forms part of the multilateration system.
6.3 Outside ATS surveillance coverage, aircraft position and level is determined by pilot reports. This reporting of position often needs to be manually integrated into the ATS system by the controller, which increases workload and introduces the potential for human error. Procedural airspace may also be less flexible for airspace users than surveillance airspace due to the many specific requirements of some procedural separation standards such as track angles, rates of closing, and the use of ground based navigation aids. In addition, the lack of surveillance precludes the use of vectors to achieve separation or sequencing and controllers are not able to provide airspace users with the safety benefits of flight path/route conformance monitoring or other safety net functions such as:
- Cleared Level Adherence Monitoring (CLAM);
- Minimum Safe Altitude Warning (MSAW); and
- Short Term Conflict Alerting (STCA).
6.4 Automatic Dependent Surveillance – Contract (ADS-C) has been introduced to some procedural airspace and may be used to provide limited surveillance of aircraft. ADS-C uses various systems on board the aircraft to automatically provide aircraft position, altitude, speed, intent and meteorological data to an ATSU in the form of reports sent periodically via satellite. In this way ADS-C may provide limited flight path/route conformance monitoring and some other safety net alerts.
6.5 While ADS-C does provide a level of surveillance of aircraft, it is important to note that ADS-C is not considered by ICAO as an ATS surveillance system. Therefore, ADS-C can not be used to provide horizontal surveillance separation between aircraft. Instead, ADS-C is used to facilitate the application of procedural separation within a mixed environment.
6.6 Figure 3 Adapted from ICAO Cir 326 AN/188 provides a graphic representation of the different methods of surveillance discussed – radar (PSR/SSR/Mode S/Multilateration) and ADS-B for ATS surveillance services; and ADS-C for enhanced procedural services.
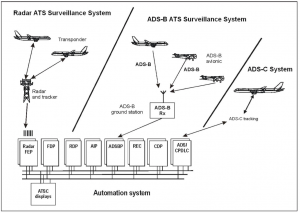
Figure 3 Adapted from ICAO Cir 326 AN/188
6.7 An example of procedural airspace supplemented by ADS-C is oceanic airspace in the Melbourne, Brisbane and Auckland Oceanic FIRs. In this airspace, there is no radar or ADS-B coverage; some aircraft report position by HF voice and other aircraft report position by ADS-C. All aircraft in this airspace are separated using procedural separation standards.
6.8 Automatic Dependent Surveillance – Broadcast (ADS-B) is a system in which, like SSR and Mode S, the aircraft transmits identity, altitude information and some other parameters such as intent to the ground station; the ADS-B transponder transmits this data every 0.5 s. Unlike SSR, the position of the aircraft in an ADS-B surveillance environment is determined by the aircraft avionics rather than the ground station.
6.9 ADS-B is considered by ICAO as an ATS surveillance system and can be suitable for the application of radar-like horizontal surveillance separation between aircraft. ADS-B may also be used to vector aircraft and provide the safety net alerts that are made possible by an ATS surveillance system.
6.10 Although the terms are similar, it can be seen that ADS-C and ADS-B are very different applications that provide controllers with different capabilities.
6.10.1 ADS-C is a limited surveillance tool to reduce pilot and controller workload and increase safety in non-surveillance airspace for aircraft equipped with ADS-C equipment.
6.10.2 ADS-B is an ATS Surveillance System that may be used by controllers in the same manner as radar to vector aircraft, provide horizontal surveillance separation and safety net alerts to aircraft equipped with an ADS-B transmitter.

